Linear inverse problems in function spaces
Contents
3. Linear inverse problems in function spaces¶
Many of the notions discussed in the finite-dimensional setting can be extended to the infinite-dimensional setting. We will focus in this chapter on inverse problems where \(K\) is a bounded linear operator and \(\mathcal{U}\) and \(\mathcal{V}\) are (infinite-dimensional) function spaces. The contents of this chapter were heavily inspired by the excellent lecture notes from Matthias J. Ehrhardt and Lukas F. Lang.
Let \(K: \mathcal{U} \rightarrow \mathcal{F}\) denote the forward operator, with \(\mathcal{U}\) and \(\mathcal{F}\) Banach spaces. The operator is bounded iff there exists a constant \(C \geq 0\) such that
The smallest such constant is called the operator norm \(\|K\|\). Note that boundedness also implies continuity, i.e. for any \(u,v \in \mathcal{U}\) we have
3.1. Well-posedness¶
We may again wonder whether the equation \(Ku = f\) is well-posed. To formally analyse this we introduce the following notation:
\(\mathcal{D}(K) = \mathcal{U}\) denotes the domain of \(K\),
\(\mathcal{R}(K) = \{Ku\,|\,u\in\mathcal{U}\}\) denotes the range of \(K\),
\(\mathcal{N}(K) = \{u\in\mathcal{U}\, | \, Ku = 0 \}\) denotes the null-space or kernel of \(K\).
When \(f \not\in \mathcal{R}(K)\), a solution obviously doesn’t exist. We can still look for a solution for which \(Ku \approx f\) by solving
A solution to (3.1) is a vector \(\widetilde{u} \in \mathcal{U}\) for which
If such a vector exists we call it the minimum-residual solution. If the null-space of \(K\) is non-empty, we can construct infinitely many such solutions. We call the one with the smallest norm the minimum-norm solution. Note however that we have not yet proven that such a solution exists in general, nor do we have a constructive way of finding it.
3.2. Bounded operators on Hilbert spaces¶
To study well-posedness of (3.1) and the corresponding minimum-norm problem we will let \(\mathcal{U}\) and \(\mathcal{F}\) be Hilbert spaces. We will return to analyzing variational problems more generally in a later chapter.
First, we introduce the adjoint of \(K\), denoted by \(K^*\) in the usual way as satisfying
We further denote the orthogonal complement of a subspace \(\mathcal{X} \subset \mathcal{U}\) as
If \(\mathcal{X}\) is a closed subspace we have \((\mathcal{X}^\perp)^\perp = \mathcal{X}\) and we have an orthogonal decomposition of \(\mathcal{U}\) given by \(\mathcal{U} = \mathcal{X} \oplus \mathcal{X}^\perp\), meaning that we can express any \(u\in \mathcal{U}\) as \(u = x + x^\perp\) with \(x\in\mathcal{X}\) and \(x^\perp\in\mathcal{X}^\perp\). The orthogonal projection onto \(\mathcal{X}\) is denoted by \(P_{\mathcal{X}}\). We briefly recall a few useful relations
Lemma : Orthogonal projection
Let \(\mathcal{X} \subset \mathcal{U}\) be a closed subspace. The orthogonal projection onto \(\mathcal{X}\) satisfies the following conditions
\(P_{\mathcal{X}}\) is self-adjoint,
\(\|P_{\mathcal{X}}\| = 1,\)
\(I - P_{\mathcal{X}} = P_{\mathcal{X}^\perp},\)
\(\|u - P_{\mathcal{X}}u\|_{\mathcal{U}} \leq \|u - v\|_{\mathcal{U}} \, \forall \, v\in\mathcal{X}\),
\(v = P_{\mathcal{X}}u\) iff \(v\in\mathcal{X}\) and \(u-v\in\mathcal{X}^\perp\).
When \(\mathcal{X}\) is not closed we have \((\mathcal{X}^\perp)^\perp = \overline{\mathcal{X}}\) (the closure of \(\mathcal{X}\)). Note that the orthogonal complement of a subspace is always closed.
We now have the following useful relations
\(\mathcal{R}(K)^\perp = \mathcal{N}(K^*),\)
\(\mathcal{N}(K^*)^\perp = \overline{\mathcal{R}(K)},\)
\(\mathcal{R}(K^*)^\perp = \mathcal{N}(K),\)
\(\mathcal{N}(K)^\perp = \overline{\mathcal{R}(K^*)},\)
from which we conclude that we can decompose \(\mathcal{U}\) and \(\mathcal{F}\) as
\(\mathcal{U} = \mathcal{N}(K) \oplus \overline{\mathcal{R}(K^*)},\)
\(\mathcal{F} = \mathcal{N}(K^*) \oplus \overline{\mathcal{R}(K)}.\)
We now have the following results
Theorem: Existence and uniqueness of the minimum-residual, minimum-norm solution
Given a bounded linear operator \(K\) and \(f \in \mathcal{F}\), a solution \(\widetilde{u}\) to (3.1)
only exists if \(f \in \mathcal{R}(K) \oplus \mathcal{R}(K)^\perp\)
obeys the normal equations \(K^*\! K\widetilde{u} = K^*\! f.\)
The unique solution \(\widetilde{u} \in \mathcal{N}(K)^{\perp}\) to the normal equations is called the minimum-norm solution.
Proof
First, we show that a minimum-residual solution necessarily obeys the normal equations:
Given a solution \(\widetilde{u}\) to (3.1) and an arbritary \(v\in\mathcal{U}\), define \(\phi(\alpha) = \|K(\widetilde{u} + \alpha v) - f\|_{\mathcal{F}}\). A necessary condition for \(\widetilde{u}\) to be a least-squares solution is \(\phi'(0) = 0\), which gives \(\langle K^*(K\widetilde{u}-f),v \rangle_{\mathcal{U}}\). As this should hold for arbritary \(v\), we find the normal equations. Note that this also implies that \(K\widetilde{u} - f \in \mathcal{R}(K)^\perp\).
Next, we show that the normal equations only allow a solution when \(f \in \mathcal{R}(K)^\perp \oplus \mathcal{R}(K)\).
Given a solution \(\widetilde{u}\), we find that \(f = K\widetilde{u} + g\) with \(g\in\mathcal{R}(K)^\perp\). Hence, \(f \in \mathcal{R}(K) \oplus \mathcal{R}(K)^\perp\). Conversely, given \(f \in \mathcal{R}(K) \oplus \mathcal{R}(K)^\perp\) , there exist \(u \in \mathcal{U}\) and \(g \in \mathcal{R}(K)^\perp = \left(\overline{\mathcal{R}(K)}\right)^\perp\) such that \(f = Ku + g\). Thus, \(P_{\overline{\mathcal{R}(K)}}f = Ku\). Such a \(u \in \mathcal{U}\) must necessarily be a solution to (3.1) because we have \(\|Ku - f\|_{\mathcal{F}} = \|P_{\overline{\mathcal{R}(K)}}f - f\|_{\mathcal{F}} \leq \inf_{g\in \overline{\mathcal{R}(K)}}\|g - f\|_{\mathcal{F}} \leq \inf_{v\in\mathcal{U}}\|Kv - f\|_{\mathcal{F}}.\) Here, we used the fact that the orthogonal projection on a subspace gives the element closest to the projected element and \(\mathcal{R}(K) \subseteq \overline{\mathcal{R}(K)}\) allows to conclude the last inequality.
Finally, we show that the minimum-norm solution is unique. Denote the minimun-norm solution by \(\widetilde{u}\). As \(\mathcal{U} = \mathcal{N}(K)^\perp \oplus \mathcal{N}(K)},\), we can write \(\widetilde{u} = v + z\) with \(v \in \mathcal{N}(K)^\perp\) and \(z \in \mathcal{N}(K)\). It follows that \(\|\widetilde{u}\|_{\mathcal{U}}^2 = \|v\|_{\mathcal{U}}^2 + 2\langle v, z \rangle_{\mathcal{U}} + \|z\|_{\mathcal{U}}^2\). Since \(v \in \mathcal{N}(K)^\perp\) and \(z \in \mathcal{N}(K)\) we have \(\langle v, z \rangle_{\mathcal{U}} = 0\) and hence \(\|\widetilde{u}\|_{\mathcal{U}} \geq \|v\|_{\mathcal{U}}\) with equality only obtained when \(z = 0\). So the unique minimum norm solution is \(\widetilde{u} = v \in \mathcal{N}(K)^\perp\).
The Moore-Penrose pseudo-inverse of \(K\) gives us a way to construct the minimum-norm solution defined above. We can think of this pseudo-inverse as the inverse of a restricted forward operator.
Definition: Moore-Penrose inverse
Given an bounded linear operator \(K:\mathcal{U}\rightarrow \mathcal{F}\) we denote its restriction to \(\mathcal{N}(K)^\perp\) as \(\widetilde{K}:\mathcal{N}(K)^\perp\rightarrow\mathcal{R}(K)\). The M-P inverse \(K^\dagger: \mathcal{R}(K)\oplus\mathcal{R}(K)^\perp \rightarrow \mathcal{N}(K)^\perp\) is defined as the unique linear extension of \(\widetilde{K}^{-1}\) with \(\mathcal{N}(K^\dagger) = \mathcal{R}(K)^\perp\).
The range of \(K^\dagger\)
Let \(u\in\mathcal{R}(K^\dagger)\), then there exists a \(f\in\mathcal{D}(K^\dagger)\) such that \(u = K^\dagger f\). By definition we can decompose \(f = f_1 + f_2\) with \(f_1\in\mathcal{R}(K)\), \(f_2 \in \mathcal{R}(K)^\perp\). Thus \(K^\dagger f = K^\dagger f_1 = \widetilde{K}^{-1}f_1\). Hence, \(u \in \mathcal{R}(\widetilde{K}^{-1}) = \mathcal{N}(K)^\perp\). This establishes that \(\mathcal{R}(K^\dagger)\subseteq \mathcal{N}(K)^\perp\). Conversely, let \(u\in\mathcal{N}(K)^\perp\). Then \(u = \widetilde{K}^{-1}\widetilde{K} = K^\dagger K u\), whence \(\mathcal{N}(K)^\perp \subseteq \mathcal{R}(K^\dagger)\). We conclude that \(\mathcal{R}(K^\dagger) = \mathcal{N}(K)^\perp\).
The pseudo-inverse satisfies a few useful relations:
Theorem: Moore-Penrose equations
The M-P pseudo-inverse \(K^{\dagger}: \mathcal{R}(K)^\perp \oplus \mathcal{R}(K) \rightarrow \mathcal{N}(K)^\perp\) of \(K\) is unique and obeys the following useful relations:
\(KK^\dagger = \left.P_{\overline{\mathcal{R}(K)}}\right|_{\mathcal{D}(K^\dagger)}.\)
\(K^\dagger K = I - P_{\mathcal{N}(K)},\)
\(K^\dagger K K^\dagger = K^\dagger,\)
\(KK^\dagger K = K,\)
Proof
Decompose \(f \in \mathcal{D}(K^\dagger)\) as \(f = f_1 + f_2\) with \(f_1\in\mathcal{R}(K)\), \(f_2\in\mathcal{R}(K)^\perp\) and use that \(K = \widetilde{K}\) on \(\mathcal{N}(K)^\perp\). Then \(KK^\dagger f = K\widetilde{K}^{-1}f_1 = f_1\). Hence, \(KK^\dagger\) acts as an orthogonal projection of \(f \in \mathcal{D}(K^\dagger)\) on \(\overline{\mathcal{R}(K)}\).
Decompose \(u \in \mathcal{U}\) in two parts \(u = u_1 + u_2\) with \(u_1 \in \mathcal{N}(K)\), \(u_2\in\mathcal{N}(K)^\perp\) we have \(K^\dagger K u = K^\dagger K u_1 = u_1\), so \(KK^\dagger\) acts like an orthogonal projection on \(\mathcal{N}(K)^\perp\) so \(KK^\dagger = I - P_{\mathcal{N}(K}\) (note that the orthogonal complement of a subspace is always closed).
Since \(KK^\dagger\) projects onto \(\overline{R}(K)\), it filters out any components in \(f\) in the null-space of \(K^\dagger\) which would disappear anyway.
Since \(K^\dagger K\) projects on \(\mathcal{N}(K)^\perp\) if filters out any components in the null-space of \(K\), which would disappear anyway.
With these, we can show that the minimum-norm solution to (3.1) is obtained by applying the pseudo-inverse to the data.
Theorem: Minimum-norm solution
Let \(K\) be a bounded linear operator with pseudo-inverse \(K^{\dagger}\) and \(f \in \mathcal{D}(K^\dagger)\), then the unique minimum-norm solution to (3.1) is given by
Proof
We know that for \(f \in \mathcal{D}(K^\dagger)\) the minimum-norm solution \(\widetilde{u} \in \mathcal{N}(K)^\perp\) exists and unique. The result now follows by \(K\widetilde{u} = P_{\overline{\mathcal{R}(K)}}f\) (so we have that \(\widetilde{u}\) is a \texit{minimum residual} solution) and that \(K^\dagger \widetilde{u} \in \mathcal{N}(K)^\perp\) (so it is a minimum norm solution by Theorem \textit{Existence and uniqueness of the minimum-residual, minimum-norm solution}).
When defining the the solution through the M-P pseudo-inverse, we have existence uniqueness of the minimum-norm to (3.1). However, we cannot expect stability in general. For this, we would need \(K^{\dagger}\) to be continuous. To see this, consider noisy data \(f^{\delta} = f + e\) with \(\|e\|\leq \delta\). For stability of the solution we need to bound the difference between the corresponding solutions \(\widetilde{u}\), \(\widetilde{u}^\delta\):
which we can only do when \(K^\dagger\) is continuous (or, equivalently, bounded).
Theorem: Continuity of the M-P pseudo-inverse
The pseudo-inverse \(K^\dagger\) of \(K\) is continuous iff \(\mathcal{R}(K)\) is closed.
Proof
For the proof, we refer to Thm 2.5 of these lecture notes.
Let’s consider a concrete example.
Example: Pseudo-inverse of a bounded operator
Consider the following forward operator
with \(k, u \in L^{1}(\mathbb{R})\). Young’s inequality tells us that \(\|Ku\|_{L^1(\mathbb{R})} \leq \|k\|_{L^1(\mathbb{R})} \cdot \|u\|_{L^1(\mathbb{R})}\) and hence that \(K\) is bounded.
We can alternatively represent \(K\) using convolution theorem as
where \(F : L^1(\mathbb{R}) \rightarrow L^{\infty}(\mathbb{R})\) denotes the Fourier transform and \(\widehat{k} = Fk\), \(\widehat{u} = Fu\).
This suggests defining the inverse of \(K\) as
We note here that, by the Riemann–Lebesgue lemma, the Fourier transform of \(k\) tends to zero at infinity. This means that the inverse of \(K\) is only well-defined when \(\widehat{f}\) decays faster than \(\widehat{k}\). However, we can expect problems when \(\widehat{k}\) has roots as well.
As a concrete example, consider \(k = \text{sinc}(x)\) with \(\widehat{k}(\xi) = H(\xi+1/2)-H(\xi-1/2)\). The forward operator then bandlimits the input. Can you think of a function in the null-space of \(K\)?
The pseudo-inverse may now be defined as
where
3.3. Compact operators¶
An important subclass of the Bounded operators are the compact operators. They can be thought of as a natural generalization of matrices to the infinite-dimensional setting. Hence, we can generalize the notions from the finite-dimensional setting to the infinite-dimensional setting.
There are a number of equivalent definitions of compact operators. We will use the following.
Definitition: Compact operator
An operator \(K: \mathcal{U} \rightarrow \mathcal{F}\) with \(\mathcal{U},\mathcal{F}\) Hilbert spaces, is called compact if it can be expressed as
where \(\{v_i\}\) and \(\{u_i\}\) are orthonormal bases of \(\mathcal{N}(K)^\perp\) and \(\overline{\mathcal{R}(K)}\) respectively and \(\{\sigma_i\}\) is a null-sequence (i.e., \(\lim_{i\rightarrow \infty} \sigma_i = 0\)). We call \(\{(u_i, v_i, \sigma_i)\}_{j=1}^\infty\) the singular system of \(K\). The singular system obeys
An important subclass of the compact operators are the Hilbert-Schmidt integral operators, which can be written as
where \(k: \Omega \times \Omega \rightarrow \mathbb{R}\) is a Hilbert-Schmidt kernel obeying \(\|k\|_{L^2(\Omega\times\Omega)} < \infty\) (i.e., it is square-integrable).
The pseudo-inverse of a compact operator is defined analogously to the finite-dimensional setting:
Definition: Pseudo-inverse of a compact operator
The pseudo-inverse of a compact operator \(K: \mathcal{U} \rightarrow \mathcal{F}\) is expressed as
where \(\{(u_i, v_i, \sigma_i)\}_{i=1}^\infty\) is the singular system of \(K\)
With this we can precisely state the Picard condition.
Definition: Picard condition
Given a compact operator \(K: \mathcal{U} \rightarrow \mathcal{F}\) and \(f \in \mathcal{F}\), we have that \(f \in \mathcal{R}(K) \oplus \mathcal{R}(K)^\perp\) iff
Remark : Degree of ill-posedness
For inverse problems with compact operators we can thus use the Picard condition to check if (3.1) has a solution. Although this establishes existence and uniqueness through the pseudo-inverse, it does not guarantee stability as \(\sigma_j \rightarrow 0\). If \(\sigma_j\) decays exponentially, we call the problem severely ill-posed, otherwise we call it mildly ill-posed.
Let’s consider a few examples.
Example: A sequence operator
Consider the operator \(K:\ell^2 \rightarrow \ell^2\), given by
i.e. we have an infinite matrix operator of the form
The operator is obviously linear. To show that is bounded we’ll compute its norm:
derivation
We can fix \(\|u\|_{\ell_2} = 1\) and verify that the maximum is obtained for \(u = (0,1,0,\ldots)\) leading to \(\|K\| = 1\).
To show that the operator is compact, we explicitly construct its singular system, giving: \(u_i = v_i = e_i\) with \(e_i\) the \(i^{\text{th}}\) canonical basis vector and \(\sigma_1 = 0\), \(\sigma_{i} = (i-1)^{-1}\) for \(i > 1\).
derivation
Indeed, it is easily verified that \(Ke_i = \sigma_i e_i\).
The pseudo inverse is then defined as
This immediately shows that \(K^\dagger\) is not bounded. Now consider obtaining a solution for \(f = (1,1,\textstyle{\frac{1}{2}}, \textstyle{\frac{1}{3}},\ldots)\). Applying the pseudo-inverse would yield \(K^\dagger f = (0,1, 1, \ldots)\) which is not in \(\ell_2\). Indeed, we can show that \(f \not\in \mathcal{R}(K) \oplus \mathcal{R}(K)^\perp\). The problem here is that the range of \(K\) is not closed.
Example: Differentiation
Consider \(K:L_2([0,1]) \rightarrow L_2([0,1])\) defined as
Given \(f(x) = Ku(x)\) we would naively let \(u(x) = f'(x)\). Let’s analyse this in more detail.
The operator can be expressed as
with \(k(x,y) = H(x-y)\), where \(H\) denotes the Heaviside stepfunction. The operator is compact because \(k\) is square integrable.
derivation
Indeed, we have
We conclude that \(k\) is a Hilbert-Schmidt kernel and hence that \(K\) is compact.
The adjoint is found to be
derivation
Using the definition we find
The singular system is given by
derivation
To derive the singular system, we first need to compute the eigenpairs \((\lambda_k, v_k)\) of \(K^*K\). The singular system is then given by \((\sqrt{\lambda_k}, (\sqrt{\lambda_k})^{-1}Kv_k, v_k)\).
We find
At \(y = 1\) this yields \(v(1) = 0\). Differentiating, we find
which yields \(v'(0) = 0\). Differentiating once again, we find
The general solution to this differential equation is
Using the boundary condition at \(x = 0\) we find that \(a = 0\). Using the boundary condition at \(x = 1\) we get
which yields \(\lambda_k = 1/((k + 1/2)^2\pi^2)\), \(k = 0, 1, \ldots\). We choose \(b\) to normalize \(\|v_k\| = 1\).
The operator can thus be expressed as
and the pseudo-inverse by
We can now study the ill-posedness of the problem by looking at the Picard condition
where \(f_k = \langle f, u_k\rangle\) are the (generalized) Fourier coefficients of \(f\).
For this infinite sum to converge, we need strong requirements on \(f_k\); for example \(f_k = 1/k\) does not suffice to make the sum converge. This is quite surprising since such an \(f\) is square-integrable. It turns out we need \(f_k = \mathcal{O}(1/k^2)\) to satisfy the Picard condition. Effectively this means that \(f'\) needs to be square integrable. This makes sense since we saw earlier that \(u(x) = f'(x)\) is the solution to \(Ku = f\).
3.4. Regularization¶
3.4.1. Truncation and Tikhonov regularization¶
In the previous section we saw that the pseudo-inverse of a compact operator is not bounded (continuous) in general. To counter this, we introduce the regularized pseudo-inverse:
where \(g_{\alpha}\) determines the type of regularization used. For Tikhonov regularisation we let
For a truncated SVD we let
We can show that the regularized pseudo inverse, \(K_{\alpha}^{\dagger}\), is bounded for \(\alpha > 0\) and converges to \(K^\dagger\) as \(\alpha \rightarrow 0\).
Given noisy data \(f^{\delta} = f + e\) with \(\|e\| \leq \delta\), we can now study the effect of regularization by studying the error. The total error is now given by
in which we recognize the bias and variance contributions. Note that we may bound this even further as
Alternatively, we may express the error in terms of the minimum-norm solution \(u = K^{\dagger} Ku = K^\dagger f\) as
Such upper bounds may be useful to study asymptotic properties of the problem but may be too loose to be used in practice. In that case a more detailed analysis incorporating the type of noise and the class of images \(u\) that we are interested in is needed.
Example: Differentiation
Consider adding Tikhonov regularisation to stabilise the differentiation problem. Take measurements \(f^{\delta} = Ku + \delta\sin(\delta^{-1}x)\), where \(\delta = \sigma_k\) for some \(k\). The error \(K^\dagger f^{\delta} - u\) is then given by
Because \(\delta^{-1} = \sigma_k\) and \(\sin(\sigma_k^{-1}x)\) is a singular vector of \(K\) (or because the pseudo-inverse acts as taking a derivative), this simplifies to
Thus, the reconstruction error does not go to zero as \(\delta\downarrow 0\), even though the error in the data does.
The eigenvalues of \(K_{\alpha}^\dagger K\) are given by \((1 + \alpha \sigma_k^{-2})^{-1}\), with \(\sigma_k = (\pi(k + 1/2))^{-1}\). The bias is thus given by
Likewise, the variance is given by
3.4.2. Generalized Tikhonov regularization¶
We have seen in the finite-dimensional setting that Tikhonov regularization may be defined through a variational problem:
It turns out we can do the same in the infinite-dimensional setting. Indeed, we can show that the corresponding normal equations are given by
Generalized Tikhonov regularization is defined in a similar manner through the variation problem
where \(L:\mathcal{U}\rightarrow \mathcal{V}\) is a (not necessarily bounded) linear operator. The corresponding normal equations can be shown to be
We can expect a unique solution when the intersection of the kernels of \(K\) and \(L\) is empty. In many applications, \(L\) is a differential operator. This can be used to impose smoothness on the solution.
3.4.3. Parameter-choice strategies¶
Given a regularization strategy with parameter \(\alpha\), we need to pick \(\alpha\). As mentioned earlier, we need to pick \(\alpha\) to optimally balance between the bias and variance in the error. To highlight the basic flavors of parameter-choice strategies, we give three examples.
Example: A-priori rules
Assuming that we know the noise level \(\delta\), we can define a parameter-choice rule \(\alpha(\delta)\). We call such a rule convergent iff
With these requirements, we can easily show that the error \(\|K_{\alpha}^\dagger f^{\delta} - K^\dagger f\|_{\mathcal{U}} \rightarrow 0\) as \(\delta\rightarrow 0\).
Such parameter-choice rules are nice in theory, but hard to design in practice. One is sometimes interested in the convergence rate, which aims to bound the bias in terms of \(\delta^\nu\) for some \(0 < \nu < 1\).
Example: The discrepancy principle
Morozov’s discrepancy principle chooses \(\alpha\) such that
with \(\eta > 1\) a fixed parameter. This can be interpreted as finding an \(\alpha\) for which the solution fits the data in accordance with the noise level. Note, however, that such an \(\alpha\) may not exist if (a significant part of) \(f^\delta\) lies in the kernel of \(K^*\). This is an example of an a-posterior parameter selection rule, as it depends on both \(\delta\) and \(f^\delta\).
Example: The L-curve method
Here, we choose \(\alpha\) via
The name stems from the fact that the optimal \(\alpha\) typically resides at the corner of the curve \((\|K_{\alpha}^\dagger f^\delta\|_{\mathcal{U}}, \|KK_{\alpha}^\dagger f^\delta - f^\delta\|_{\mathcal{F}})\).
This rule has the practical advantage that no knowledge of the noise level is required. Such a rule is called a heuristic method. Unfortunately, it is not a convergent rule.
3.5. Exercises¶
3.5.1. Convolution¶
Consider the example in section 3.2 with \(k(x) = \exp(-|x|)\).
Is the inverse problem ill-posed?
For which functions \(f\) is the inverse well-defined?
Answer
Here we have \(\widehat{k}(\xi) = \sqrt{2/\pi} (1 + \xi^2)^{-1}\) (cf. this table). For the inverse we then need \((1 + \xi^2)\widehat{f}(\xi)\) to be bounded. We conclude that the inverse problem is ill-posed since a solution will not exist for all \(f\). Moreover, we can expect amplification of the noise if it has non-zero Fourier coefficients for large \(|\xi|\).
We can only define the inverse for functions \(f\) whose Fourier transform decays rapidly in the sense that \(\lim_{|\xi|\rightarrow} (1 + \xi^2)\widehat{f}(\xi) < \infty\). Examples are \(f(x) = e^{-ax^2}\) or \(f(x) = \text{sinc}(ax)\) for any \(a > 0\). We may formalise this by introducing Schwartz functions but this is beyond the scope of this course.
3.5.2. Differentiation¶
Consider the forward operator
We’ve seen in the example that the inverse problem is ill-posed. Consider the regularized least-squares problem
with \(\|\cdot\|\) denoting the \(L^2([0,1])\)-norm. In this exercise we are going to analyze how this type of regularization addresses the ill-posedness by looking at the variance term.
Show that the corresponding regularized pseudo-inverse is given by
where \(\{(u_k,v_k,\sigma_k)\}_{k=0}^\infty\) denotes the singular system of \(K\).
Take \(f^\delta(x) = f(x) + \sigma_k \sqrt{2}\sin(\sigma_k^{-1}x)\) with \(\sigma_k\) a singular value of \(K\) and show that for \(\alpha > 0\) the variance \(\|K_{\alpha}^\dagger (f^\delta - f)\| \rightarrow 0\) as \(k \rightarrow 0\)
Answer
We will use the SVD of \(K\) to express the solution and derive a least-squares problem for the coefficients of \(u\) using the orthonormality of the singular vectors.
The right singular vectors are given by \(v_k(x) = \sqrt{2}\cos\left(\sigma_k^{-1} x\right)\) with \(\sigma_k = (\pi(k+1/2))^{-1}\). Since these constitute an orthonormal basis for the orthogonal complement of the kernel of \(K\) we can express \(u\) as
with \(Kw = 0\). We’ll ignore \(w\) for the time being and assume without proof that \(\{v_k\}_{k=0}^\infty\) is an orthonormal basis for \(L^2([0,1])\).
We can now express the least-squares problem in terms of the coefficients \(a_k\) First note that
with \(u_k(x)\) denoting the left singular vectors \(u_k(x) = \sqrt{2}\sin\left(\sigma_k^{-1} x\right)\). Then
and using the fact that \(Kv_k = \sigma_k u_k\):
with \(f_k = \langle u_k, f\rangle\). The normal equations are now given by
yielding
We can now study what happens to the variance term \(\|K_{\alpha}^\dagger e\|\) with \(e_k(x) = \sigma_k \sin(x/\sigma_k)\). First note that (by orthogonality)
We see, as before, that for \(\alpha = 0\) the variance is constant as \(k\rightarrow \infty\) (i.e, noise level going to zero). For \(\alpha > 0\), however, we see that the variance tends to zero.
3.5.3. Convergent regularization¶
Consider the regularized pseudo-inverse
and let \(f^\delta = f + e\) with \(\|e\|_{\mathcal{F}} \leq \delta\). We are going to study the convergence of this method, i.e., how fast \(\|K_{\alpha}^\dagger f^\delta - K^\dagger f\| \rightarrow 0\). You may assume that \(f \in \mathcal{R}(K)\) and that \(f^\delta\) obeys the Picard condition. We further let
and \(\alpha(\delta) = \sqrt{\delta}\).
Show that the total error \(\|K_{\alpha}^\dagger f^\delta - K^\dagger f\|\) converges to zero as \(\delta \rightarrow 0\).
Show that the variance term converges to zero as \(\delta\rightarrow 0\) with rate \(1/2\):
Under additional assumptions on the minimum-norm solution we can provide a faster convergence rate in. Assume that for a given \(\mu > 0\) there exists a \(w\) such that \(K^\dagger f = (K^*K)^{\mu} w\).
Show that this condition implies that (i.e., more regularity of \(f\))
Show that
Answer
We split the error in its bias and variance terms and consider each separately. The bias term is given by \(\|(K^\dagger - K_{\alpha}^\dagger)f\|\), which we express as
We can split off a factor \(\sigma_k^{-1}\) and bound as
Since \(f\) obeys the Picard condition, the second term is finite. The first term can be bounded because \(0 < sg_{\alpha}(s) \leq 1\). Moreover, we see that at \(\alpha = 0\) we have \((1 - \sigma_k g_{\alpha}(\sigma_k))^2 = 0\). We conclude that the bias converges to zero as \(\delta \rightarrow 0\). We do not get a rate, however.
The variance term can be shown to converge to zero as well, as done below.
We find
with \(\|K^\dagger_{\alpha(\delta)}\| = \sup_k |g_{\alpha(\delta)}(\sigma_k)|\). To bound this, we observe that \(|g_{\alpha}(s)| \leq \alpha^{-1}\). Setting \(\alpha = \sqrt{\delta}\) we get the desired result.
Start from
and substitute \(f = K(K^*K)^{\mu} w = \sum_{k=0}^\infty \sigma_k^{2\mu+1}\langle w,u_k\rangle u_k\) (the first equality follows from the assumption \(f \in \mathcal{R}(K)\) and the first property of ‘Theorem: Moore-Penrose equations’) to get
Starting again from the bias term, we can factor out an additional \(\sigma^{4\mu}\) term. We then use that \(s^{2\mu}(1 - sg_{\alpha}(s)) \leq \alpha^{2\mu} \) and \(\alpha(\delta) = \sqrt(\delta)\) to find the desired result.
3.5.4. Convolution through the heat equation¶
In this exercise we’ll explore the relation between the heat equation and convolution with a Gaussian kernel. Define the forward problem \(f = Ku\) via the initial-value problem
Verify that the solution to the heat equation is given by
where \(g_t(x)\) is the heat-kernel:
You may assume that \(u\) is sufficiently regular and use that \(g_t(x)\) converges (in the sense of distributions) to \(\delta(x)\) as \(t \downarrow 0\).
Show that we can thus express the forward operator as
Show that the operator may be expressed as
where \(\cdot\) denotes point-wise multiplication and \(F\) denotes the Fourier transform.
Express the inverse of \(K\) as multiplication with a filter \(\widehat{h}\) (in the Fourier domain). How does ill-posed manifest itself here and how does it depend on \(T\) ?
We define a regularized filter (in the Fourier domain) by band limitation:
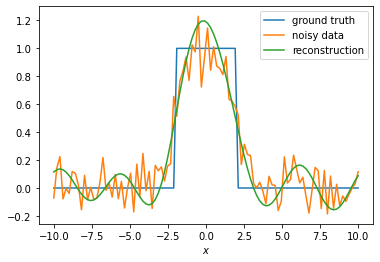
Test its effect numerically on noisy data for \(T = 2\) using the code below. In particular, design an a-priori parameter selection rule \(\alpha(\delta)\) that ensures that the total error converges and stays below 1 (in relative sense). Does this rule do better than the naive choice \(\alpha(\delta) = \delta\)?
import numpy as np
import matplotlib.pyplot as plt
# grid and parameters
T = 10
delta = 1e-1
alpha = 20
n = 100
x = np.linspace(-10,10,n)
xi = np.fft.rfftfreq(n, d=1.0)
# define ground truth
u = np.heaviside(2-np.abs(x),1)
# define operator
gh = np.exp(-T*(2*np.pi*xi)**2)
K = lambda u : np.fft.irfft(np.fft.rfft(u)*gh)
# define regularised inverse
w = lambda alpha : np.piecewise(xi, [np.abs(xi) <= 1/alpha, np.abs(xi) > 1/alpha], [1, 0])
R = lambda alpha,f : np.fft.irfft(w(alpha)*np.fft.rfft(f)/gh)
# generate noisy data
f_delta = K(u) + delta*np.random.randn(n)
# reconstruction
u_alpha_delta = R(alpha,f_delta)
# plot
plt.plot(x,u,label='ground truth')
plt.plot(x,f_delta,label='noisy data')
plt.plot(x,u_alpha_delta,label='reconstruction')
plt.xlabel(r'$x$')
plt.legend()
plt.show()
Answer
We can easily verify that it indeed satisfies the differential equation by computing \(v_t\) and \(v_{xx}\). To show that it satisfies the initial condition, we take the limit \(t\rightarrow 0\) and use that \(\lim_{t\rightarrow 0} \int g_t(x)u(x) \mathrm{d}x = u(0)\).
Setting \(t = T\) in the previous expression gives the desired result.
This follows from the convolution theorem.
The inverse of \(K\) is naively given by multiplication with \((Fg_T)^{-1}\) in the Fourier domain. We have \(\widehat{g}_T(\xi) \propto e^{-T \xi^2}\) so we can only usefully define the inverse on functions whose Fourier spectrum decays fast enough such that the inverse Fourier transform of \(\widehat{f}/\widehat{g}_T\) can be defined. Thus a solution does not exist for a large class of \(f\) and noise is amplified exponentially. This only gets worse for larger \(T\).
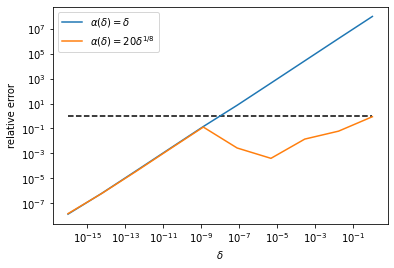
See the code below. We compute the total error using the function
reconstructwhich computes noisy data and reconstructs using the regularised inverse. To get a more stable result we average over a number of random instances of the noise. Using \(\alpha(\delta) = \delta\) gives a (numerically) convergent result, however for large \(\delta\) it gives a very large error. Picking \(\alpha(\delta)\) to converge a bit slower allows one to keep the relative total error below 1. Note that we only show convergence of the error for one particular \(u\), so we cannot conclude that this will work in general as in a previous exercise. If you like Fourier analysis and sampling theory, this may be a nice exercise.
import numpy as np
import matplotlib.pyplot as plt
# grid and parameters
T = 2
delta = 1e-1
alpha = 20
n = 100
x = np.linspace(-10,10,n)
xi = np.fft.rfftfreq(n, d=1.0)
# define ground truth
u = np.heaviside(2-np.abs(x),1)
# define operator
gh = np.exp(-T*(2*np.pi*xi)**2)
K = lambda u : np.fft.irfft(np.fft.rfft(u)*gh)
# define regularised inverse
w = lambda alpha : np.piecewise(xi, [alpha*np.abs(xi) <= 1, alpha*np.abs(xi) > 1], [1, 0])
R = lambda alpha,f : np.fft.irfft(w(alpha)*np.fft.rfft(f)/gh)
def reconstruct(u, delta, alpha, nsamples = 10):
error = 0
for k in range(nsamples):
# generate noisy data
f_delta = K(u) + delta*np.random.randn(n)
# reconstructions
u_alpha_delta = R(alpha,f_delta)
# compute error
error += np.linalg.norm(u - u_alpha_delta)/np.linalg.norm(u)/nsamples
#
return error
alpha1 = lambda delta : delta
alpha2 = lambda delta : 20*delta**(1/8)
ns = 10
delta = np.logspace(-16,0,ns)
error1 = np.zeros(ns)
error2 = np.zeros(ns)
for k in range(ns):
error1[k] = reconstruct(K(u), delta[k], alpha1(delta[k]),nsamples=100)
error2[k] = reconstruct(K(u), delta[k], alpha2(delta[k]),nsamples=100)
plt.loglog(delta,0*delta + 1,'k--')
plt.loglog(delta,error1,label=r'$\alpha(\delta) = \delta$')
plt.loglog(delta,error2,label=r'$\alpha(\delta) = 20\delta^{1/8}$')
plt.xlabel(r'$\delta$')
plt.ylabel(r'relative error')
plt.legend()
<matplotlib.legend.Legend at 0x7fc189080850>
3.6. Assignments¶
3.6.1. Discretisation¶
In this exercise, we explore what happens when discretizing the operator \(K\). We’ll see that discretization implicitly regularizes the problem and that refining the discretization brings out the inherent ill-posedness. Discretize \(x_k = k\cdot h\) with \(k = 1, \ldots, n\) and \(h = 1/(n+1)\).
with \(k_{ij} = k(x_i,x_j) = H(x_i - x_j)\), giving an \(n\times n\) lower triangular matrix
Compute the SVD for various \(n\) and compare the singular values and vectors to the ones of the continuous operator. What do you notice?
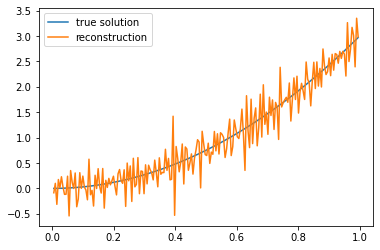
Take \(f(x) = x^3 + \epsilon\) with \(\epsilon\) is normally distributed with mean zero and variance \(\delta^2\). Investigate the accuracy of the reconstruction (use
np.linalg.solveto solve \(Ku = f\)). Note that the exact solution is given by \(u(x) = 3x^2\). Do you see the regularizing effect of \(n\)?
The code to generate the matrix and its use are given below.
import numpy as np
import matplotlib.pyplot as plt
def getK(n):
h = 1/(n+1)
x = np.linspace(h,1-h,n)
K = h*np.tril(np.ones((n,n)))
return K,x
n = 200
delta = 1e-3
K,x = getK(n)
u = 3*x**2
f = x**3 + delta*np.random.randn(n)
ur = np.linalg.solve(K,f)
print('|u - ur| = ', np.linalg.norm(u - ur))
plt.plot(x,u,label='true solution')
plt.plot(x,ur,label='reconstruction')
plt.legend()
plt.show()
|u - ur| = 4.053285603884263
3.6.2. Convolution on a finite interval¶
We can define convolution with a Gaussian kernel on a finite interval \([0,\pi]\) through the initial boundary-value problem
with \(f(x) = v(1,x)\). The solution of the initial boundary-value problem is given by
with \(a_k\) are the Fourier sine coefficients of \(u\):
Assume that we use \( \langle u, v \rangle = \frac{2}{\pi}\int_0^{\pi} u(x) v(x) \mathrm{d}x\) as inner product and define the forward operator \(f = Ku\) in terms of the solution of the IBVP as \(f(x) = v(1,x)\).
1. Give the singular system of \(K\), i.e., find \((\sigma_k, u_k, v_k)\) such that \(Ku(x)\) can be expressed as
We can now define a regularized pseudo-inverse through the variational problem
where we investigate two types of regularization
\(R(u) = \|u\|^2,\)
\(R(u) = \|u'\|^2.\)
2. Show that these lead to the following regularized pseudo-inverses
\(K_{\alpha}^\dagger f = \sum_{k=0}^\infty \frac{1}{\sigma_k + \alpha\sigma_k^{-1}}\langle f, u_k \rangle v_k(x).\)
\(K_{\alpha}^\dagger f = \sum_{k=0}^\infty \frac{1}{\sigma_k + \alpha k^2\sigma_k^{-1}}\langle f, u_k \rangle v_k(x)\)
hint: you can use the fact that the \(v_k\) form an orthonormal basis for functions on \([0,\pi]\) and hence express the solution in terms of this basis.
We can now study the need for regularization, assuming that the Fourier coefficients \(f_k = \langle f, u_k \rangle\) of \(f\) are given.
3. Determine which type of regularization (if any) is needed to satisfy the Picard condition in the following cases (you can set \(\alpha = 1\) for this analysis)
\(f_k = \exp(-2 k^2)\)
\(f_k = k^{-1}\)
4. Compute the bias and variance for \(u(x) = \sin(k x)\) and measurements \(f^{\delta}(x) = Ku(x) + \delta \sin(\ell x)\) for fixed \(k < \ell\) and \(\delta\). Plot the bias and variance for well-chosen \(k,\ell\) and \(\delta\) and discuss the difference between the two types of regularization.