Numerical optimization for inverse problems
Contents
6. Numerical optimization for inverse problems¶
In this chapter we treat numerical algorithms for solving optimization problems over \(\mathbb{R}^n\). Throughout we will assume that the objective \(J(u) = D(u) + R(u)\) satisfies the conditions for a unique minimizer to exist. We distinguish between two important classes of problems; smooth problems and convex problems.
6.1. Smooth optimization¶
For smooth problems, we assume to have access to as many derivatives of \(J\) as we need. As before, we denote the first derivative (or gradient) by \(J' : \mathbb{R}^n \rightarrow \mathbb{R}^n\). We denote the second derivative (or Hessian) by \(J'' : \mathbb{R}^n \rightarrow \mathbb{R}^{n\times n}\). We will additionally assume that the Hessian is globally bounded, i.e. there exists a constant \(L < \infty\) such that \(-L\cdot I \preceq J''(u) \preceq L\cdot I\) for all \(u\in\mathbb{R}^n\). Note that this implies that \(J'\) is Lipschitz continous with constant \(L\): \(\|J'(u) - J'(v)\|_2 \leq L \|u - v\|_2\).
For a comprehensive treatment of this topic (and many more), we recommend the seminal book Numerical Optimization by Stephen Wright and Jorge Nocedal [Nocedal and Wright, 2006].
Before discussing optimization methods, we first introduce the optimality conditions.
Definition: Optimality conditions
Given a smooth functional \(J:\mathbb{R}^n\rightarrow \mathbb{R}\), a point \(u_* \in \mathbb{R}^n\) is local minimizer iff it satisfies the first and second order optimality conditions
If \(J''(u_*) \succ 0\) we call \(u_*\) a strict local minimizer.
6.1.1. Gradient descent¶
The steepest descent method proceeds to find a minimizer through a fixed-point iteration
where \(\lambda > 0\) is the step size. The following theorem states that this iteration will yield a fixed point of \(J\), regardless of the initial iterate, provided that we pick \(\lambda\) small enough.
Theorem: Global convergence of steepest descent
Let \(J:\mathbb{R}^n\rightarrow \mathbb{R}\) be a smooth, Lipschitz-continuos functional. The fixed point iteration
with \(\lambda \in (0,(2L)^{-1})\) produces iterates \(u_k\) for which
with \(C = \lambda \left( 1 - \textstyle{\frac{\lambda L}{2}}\right)\) and \(J_* = \min_u J(u)\). This implies that \(\|J'(u_k)\|_2 \rightarrow 0\) as \(k\rightarrow \infty\). To guarantee \(\min_{k\in \{0,1,\ldots, n-1\}} \|J'(u_k)\|_2 \leq \epsilon\) we thus need \(\mathcal{O}(1/\epsilon^2)\) iterations.
Proof
Start from a Taylor expansion:
Now bound the last term using the fact that \(J''(u) \preceq L\cdot I\) and plug in \(u_{k+1} - u_k = -\lambda J'(u_k)\) to get
We conclude that for \(0 < \lambda < \textstyle{\frac{1}{2L}}\) we have that \(J(u_{k+1}) < J(u_k)\) unless \(\|J'(u_k)\|_2 = 0\), in which case \(u_k\) is a stationary point. Now, sum over \(k\) and re-organise to get
with \(C = \lambda \left( 1 - \textstyle{\frac{\lambda L}{2}}\right)\). Since \(J_* \leq J(u_n)\) we obtain the desired result.
Stronger statements about the rate of convergence can be made by making additional assumptions on \(J\) (such as (strong) convexity), but this is left as an exercise.
6.1.2. Line search¶
While the previous results are nice in theory, we usually do not have access to the Lipschitz constant \(L\). Moreover, the global bound on the step size provided by the Lipschitz constant may be pessimistic for a particular starting point. This could lead us to pick a very small step size, yielding slow convergence in practice. A popular way of choosing a step size adaptively is a line search strategy. To introduce these, we slightly broaden the scope and consider the iteration
where \(d_k\) is a descent direction satisfying \(\langle d_k, J'(u_k)\rangle < 0\). Obviously, \(d_k = - J'(u_k)\) is a descent direction, but other choices may be beneficial in practice. In particular, we can choose \(d_k = -B J'(u_k)\) for any positive-definite matrix \(B\) to obtain a descent direction. How to choose such a matrix will be discussed in the next section.
Two important line search methods are discussed below.
Definition: Backtracking line search
In order to ensure sufficient progress of the iterations, we can choose a steplength that guarantees sufficient descent:
with \(c_1 \in (0,1)\) a small constant (typically \(c_1 = 10^{-4}\)). Existence of a \(\lambda\) satisfying these conditions is guaranteed by the regularity of \(J\). We can find a suitable \(\lambda\) by backtracking:
def backtracking(J,Jp,u,d,lmbda,rho=0.5,c1=1e-4)
"""
Backtracking line search to find a step size satisfying J(u + lmbda*d) <= J(u) + lmbda*c1*J(u)^Td
Input:
J - Function object returning the value of J at a given input vector
Jp - Function object returning the gradient of J at a given input vector
u - current iterate as array of length n
d - descent direction as array of length n
lmbda - initial step size
rho,c1 - backtracking parameters, default (0.5,1e-4)
Output:
lmbda - step size satisfying the sufficient decrease condition
"""
while J(u + lmbda*d) > J(u) + c*lmbda*Jp(u).dot(d):
lmbda *= rho
return lmbda
Definition: Wolfe linesearch
A possible disadvantage of the backtracking linesearch introduced earlier is that it may end up choosing very small stepsizes. To obtain a stepsize that yields a new iterate at which the slope of \(J\) is not too large, we introduce the following condition
where \(c_2\) is a small constant satisfying \(0 < c_1 < c_2 < 1\). The conditions (6.2) and (6.3), are referred to as the strong Wolfe conditions. Existence of a stepsize satisfying these conditions is again guaranteed by the regularity of \(J\) (cf. [Nocedal and Wright, 2006], lemma 3.1). Finding such a \(\lambda\) is a little more involved than the backtracking procedure outlined above (cf. [Nocedal and Wright, 2006], algorithm 3.5). Luckily, the SciPy library provides an implementation of this algorithm (cf. scipy.optimize.line_search)
6.1.3. Second order methods¶
A well-known method for root finding is Newton’s method, which finds a root for which \(J'(u) = 0\) via the fixed point iteration
We can interpret this method as finding the new iterate \(u_{k+1}\) as the (unique) minimizer of the quadratic approximation of \(J\) around \(u_k\):
Theorem: Convergence of Newton’s method
Let \(J\) be a smooth functional and \(u_*\) be a (local) minimizer. For any \(u_0\) sufficiently close to \(u_*\), the iteration (6.4) converges quadratically to \(u_*\), i.e.,
with \(M = 2\|J'''(u_*)\|_2 \|J''(u_*)^{-1}\|_2\).
Proof
See [Nocedal and Wright, 2006], Thm. 3.5.
In practice, the Hessian may not be invertible everywhere and we may not have an initial iterate sufficiently close to a minimizer to ensure convergence. Practical applications therefore include a line search and a safeguard against non-invertible Hessians.
In some applications, it may be difficult to compute and invert the Hessian. This problem is addressed by so-called quasi-Newton methods which approximate the Hessian. The basis for such approximations is the secant relation
which is satisfied by the true Hessian \(J''\) at a point \(\eta_k = u_k + t(u_{k+1} - u_k)\) for some \(t \in (0,1)\). Obviously, we cannot hope to solve for \(H_k \in \mathbb{R}^{n\times n}\) from just these \(n\) equations. We can, however, impose some structural assumptions on the Hessian. Assuming a simple diagonal structure \(H_k = h_k I\) yields \(h_k = \langle J'(u_{k+1}) - J'(u_k), u_{k+1} - u_k\rangle/\|u_{k+1} - u_k\|_2^2\). In fact, even gradient-descent can be interpreted in this manner by approximating \(J''(u_k) \approx L \cdot I\).
An often-used approximation is the Broyden-Fletcher-Goldfarb-Shannon (BFGS) approximation, which keeps track of the steps \(s_k = u_{k+1} - u_k\) and gradients \(y_k = J'(u_{k+1}) - J'(u_k)\) to recursively construct an approximation of the inverse of the Hessian as
with \(\rho_k = (\langle s_k, y_k\rangle)^{-1}\) and \(B_0\) choses appropriately (e.g., \(B_0 = L^{-1} \cdot I\)). It can be shown that this approximation is sufficiently accurate to yield super linear convergence when using a Wolfe line search.
The are many practical aspects to implementing such methods. For example, what do we do when the approximated Hessian becomes (almost) singular? Discussing these issues is beyond the scope of these lecture notes and we refer to [Nocedal and Wright, 2006], chapter 6 for more details. The SciPy library provides an implementation of various optimization methods.
6.2. Convex optimization¶
In this section, we consider finding a minimizer of a convex functional \(J : \mathbb{R}^n \rightarrow \mathbb{R}_{\infty}\). Note that we allow the functionals to take values on the extended real line. We accordingly define the domain of \(J\) as \(\text{dom}(J) = \{u \in \mathbb{R}^n \, | \, J(u) < \infty\}\).
To deal with convex functionals that are not smooth, we first generalize the notion of a derivative.
Definition: subgradient
Given a convex functional \(J\), we call \(g \in \mathbb{R}^n\) a subgradient of \(J\) at \(u\) if
This definition is reminiscent of the Taylor expansion and we can indeed easily check that it holds for convex smooth functionals for \(g = J'(u)\). For non-smooth functionals there may be multiple vectors \(g\) satisfying the inequality. We call the set of all such vectors the subdifferential which we will denote as \(\partial J(u)\). We will generally denote an arbritary element of \(\partial J(u)\) by \(J'(u)\).
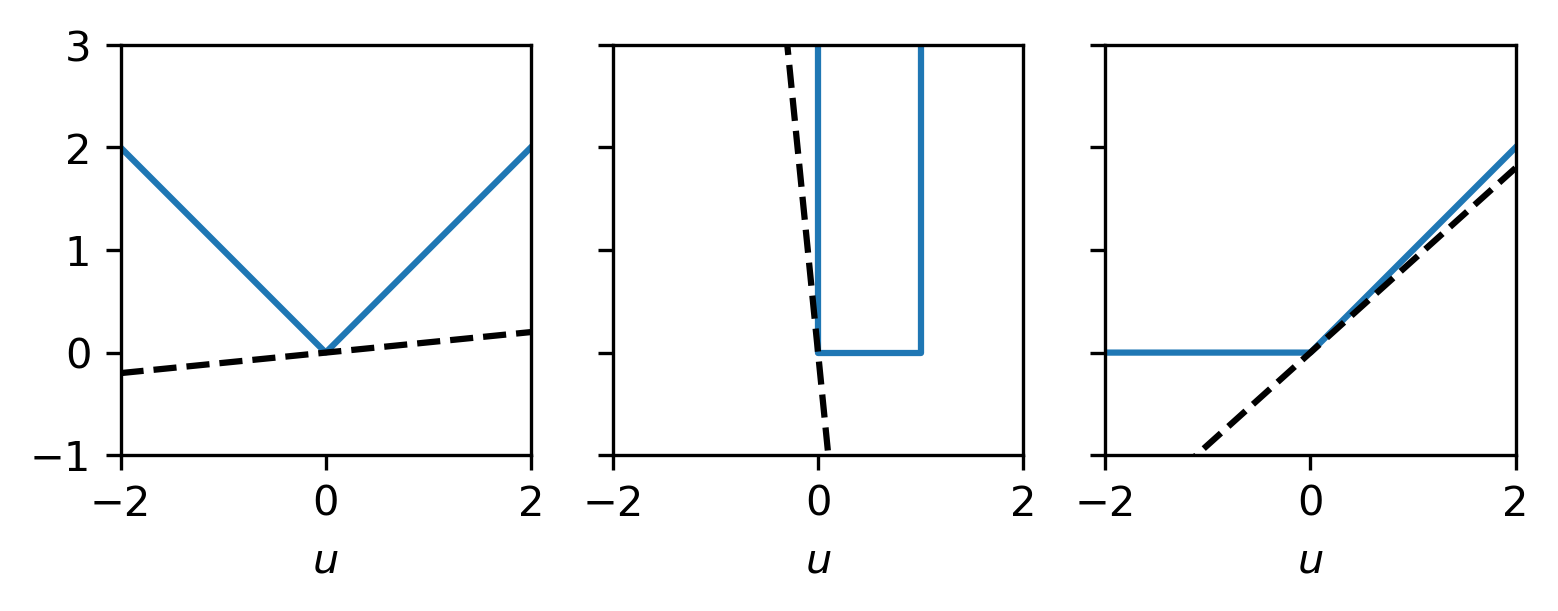
Example: Subdifferentials of some functions
Let
\(J_1(u) = |u|\),
\(J_2(u) = \delta_{[0,1]}(u)\),
\(J_3(u) = \max\{u,0\}\).
All these functions are convex and exhibit a discontinuity in the derivative at \(u = 0\). The subdifferentials at \(u=0\) are given by
\(\partial J_1(0) = [-1,1]\)
\(\partial J_2(0) = (-\infty,0]\)
\(\partial J_3(0) = [0,1]\)
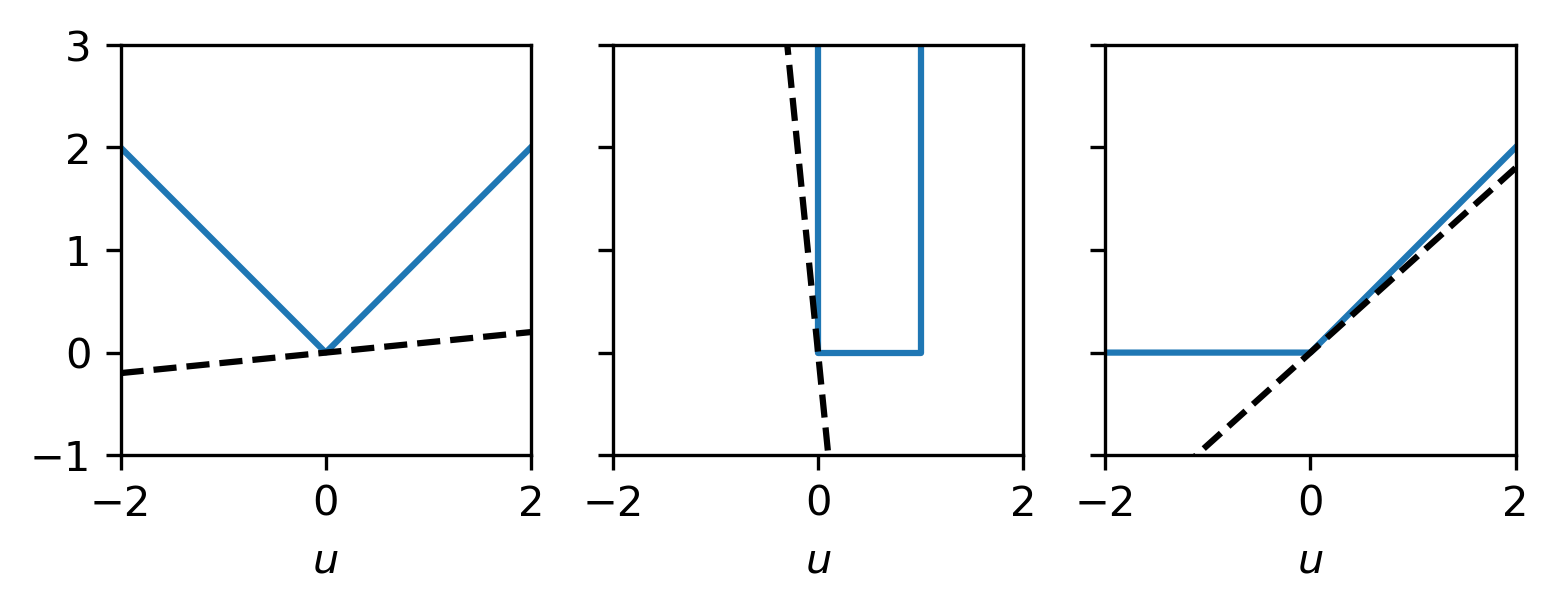
Fig. 6.1 Examples of several convex functions and an element of their subdifferential at \(u=0\).¶
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['figure.dpi'] = 300
from myst_nb import glue
#
J1 = lambda u : np.abs(u)
J2 = lambda u : np.piecewise(u, [u<0, u > 1],[lambda u : 1e6, lambda u : 1e6, 0])
J3 = lambda u : np.piecewise(u, [u<0, u > 0],[lambda u : 0, lambda u : u])
#
u = np.linspace(-2,2,1000)
fig, ax = plt.subplots(1,3,sharey=True)
ax[0].plot(u,J1(u))
ax[0].plot(u,.1*u,'k--')
ax[0].set_xlim([-2,2])
ax[0].set_ylim([-1,3])
ax[0].set_aspect(1)
ax[0].set_xlabel(r'$u$')
ax[1].plot(u,J2(u))
ax[1].plot(u,-10*u,'k--')
ax[1].set_xlim([-2,2])
ax[1].set_ylim([-1,3])
ax[1].set_aspect(1)
ax[1].set_xlabel(r'$u$')
ax[2].plot(u,J3(u))
ax[2].plot(u,.9*u,'k--')
ax[2].set_xlim([-2,2])
ax[2].set_ylim([-1,3])
ax[2].set_aspect(1)
ax[2].set_xlabel(r'$u$')
glue("convex_examples",fig)
Some useful calculus rules for subgradients are listed below.
Theorem: Computing subgradients
Let \(J_i:\mathbb{R}^n \rightarrow \mathbb{R}_{\infty}\) be proper convex functionals and let \(A\in\mathbb{R}^{n\times n}\), \(b \in \mathbb{R}^n\). We then have the following usefull rules
Summation: Let \(J = J_1 + J_2\), then \(J_1'(u) + J_2'(u) \in \partial J(u)\) for \(u\) in the interior of \(\text{dom}(J)\).
Affine transformation: Let \(J(u) = J_1(Au + b)\), then \(A^T J_1'(Au + b) \in \partial J\) for \(u, Au + b\) in the interior of \(\text{dom}(J)\).
An overview of other useful relations can be found in e.g., [Beck, 2017] section 3.8.
With this we can now formulate optimality conditions for convex optimization.
Definition: Optimality conditions for convex optimization
Let \(J:\mathbb{R}^n \rightarrow \mathbb{R}_{\infty}\) be a proper convex functional. A point \(u_* \in \mathbb{R}^n\) is a minimizer iff
Example: Computing the median
The median \(u\) of a set of numbers \((f_1, f_2, \ldots, f_n)\) (with \(f_i < f_{i+1}\)) is a minimizer of
Introducing \(J_i = |u - f_i|\) we have
with which we can compute \(J'(u)\) using the sum-rule:
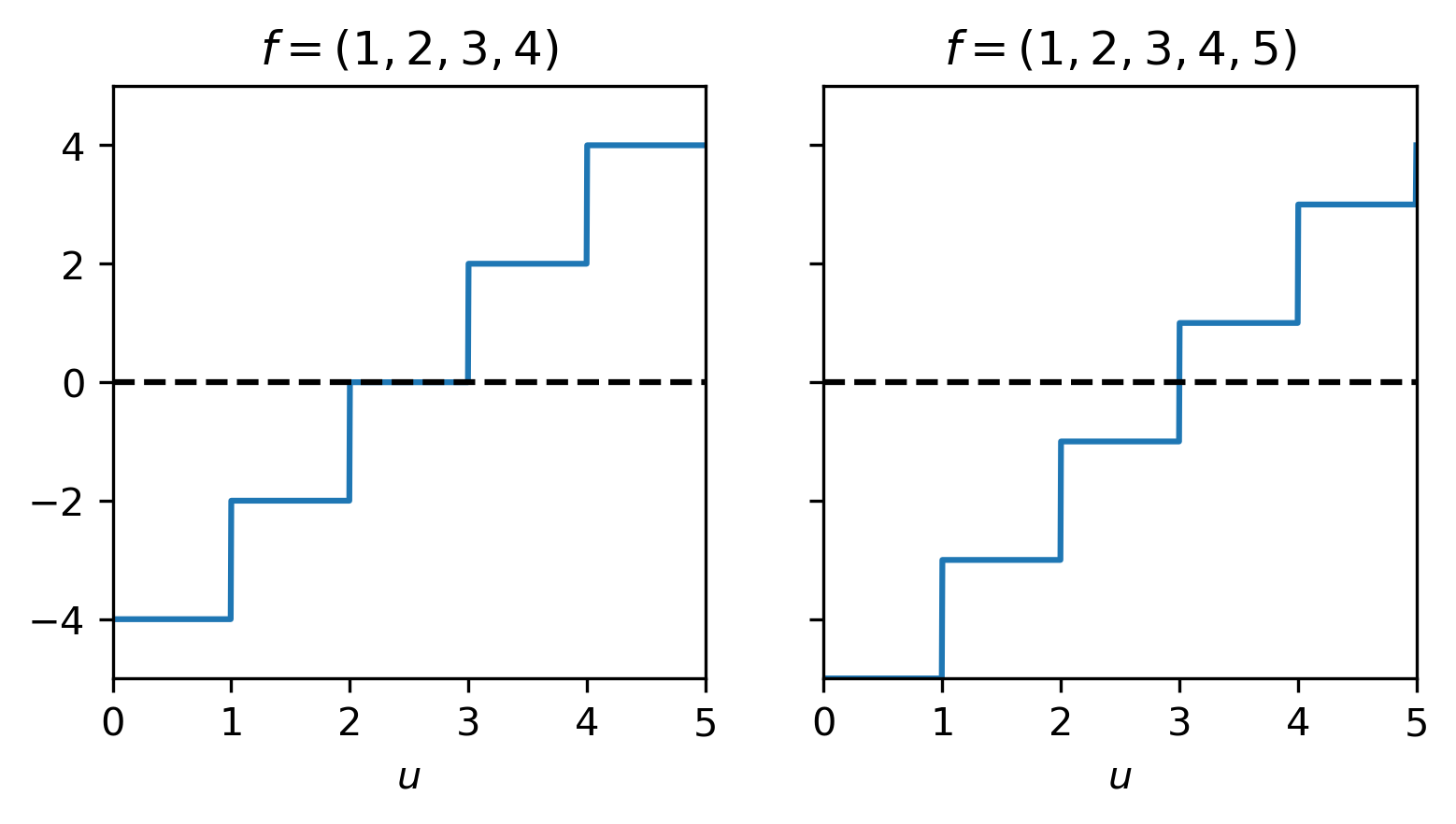
To find a \(u\) for which \(0\in J'(u)\) we need to consider the middle two cases. If \(n\) is even, we can find an \(i\) such that \(2i = n\) and get that for all \(u \in [f_{n/2},f_{n/2+1}]\) we have \(0 \in J'(u)\). When \(n\) is odd, we have optimality only for \(u = f_{(n+1)/2}\).
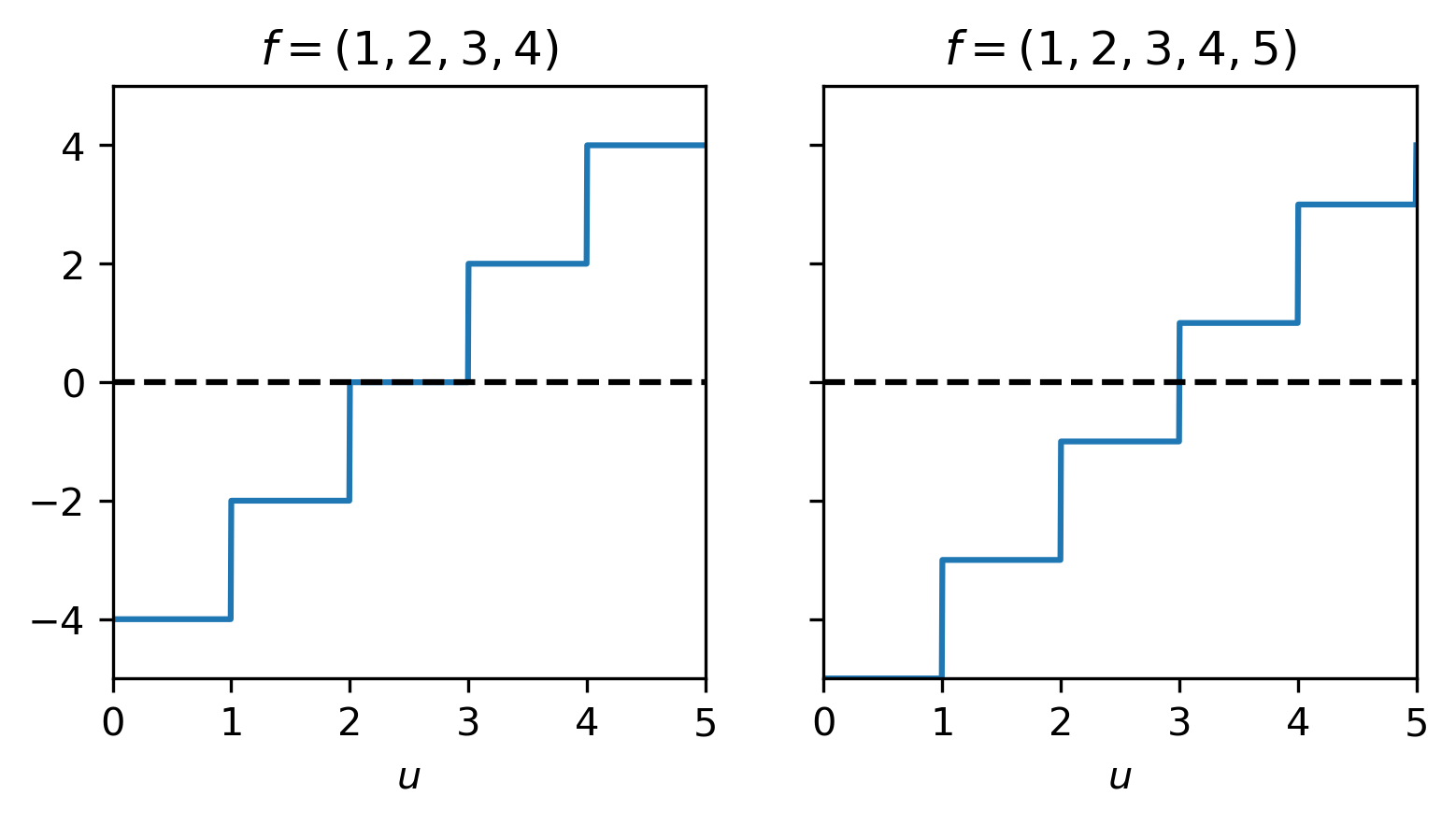
Fig. 6.2 Subgradient of \(J\) for \(f=(1,2,3,4)\) and \(f=(1,2,3,4,5)\).¶
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['figure.dpi'] = 300
from myst_nb import glue
#
f1 = np.array([1,2,3,4])
f2 = np.array([1,2,3,4,5])
#
Jip = lambda u,f : np.piecewise(u,[u<f,u==f,u>f],[lambda u : -1, lambda u : 0, lambda u : 1])
def Jp(u,f):
n = len(f)
g = np.zeros(u.shape)
for i in range(n):
g = g + Jip(u,f[i])
return g
#
u = np.linspace(0,5,1000)
fig, ax = plt.subplots(1,2,sharey=True)
ax[0].plot(u,Jp(u,f1))
ax[0].plot(u,0*u,'k--')
ax[0].set_xlim([0,5])
ax[0].set_ylim([-5,5])
ax[0].set_xlabel(r'$u$')
ax[0].set_aspect(.5)
ax[0].set_title(r'$f = (1,2,3,4)$')
ax[1].plot(u,Jp(u,f2))
ax[1].plot(u,0*u,'k--')
ax[1].set_xlim([0,5])
ax[1].set_ylim([-5,5])
ax[1].set_xlabel(r'$u$')
ax[1].set_aspect(.5)
ax[1].set_title(r'$f = (1,2,3,4,5)$')
glue("median_example",fig)
6.2.1. Subgradient descent¶
A natural extension of the gradient-descent method for smooth problems is the subgradient descent method:
where \(\lambda_k\) denote the step sizes.
Theorem: Convergence of subgradient descent
Let \(J : \mathbb{R}^n \rightarrow \mathbb{R}\) be a convex, \(L-\) Lipschitz-continuous function. The iteration (6.5) produces iterates for which
Thus, \(J(u_k) \rightarrow J(u_*)\) as \(k\rightarrow \infty\) when the stepsize satisfy
Proof
First, we expand \(\|u_{k+1} - u_*\|_2^2\) by using the definition of \(u_{k+1}\):
Using the subgradient inequality, we find
Applying this inequality recursively on \(u_{k}\) yields
Using Lipschitz continuity of \(J\), we find \(\|J'(u)\|_2 \leq L\) which can be used to yield:
which can be used to yield the desired result.
Remark: Convergence rate for a fixed stepsize
If we choose \(\lambda_k = \lambda\), we get
we can guarantee that \(\min_{k\in\{0,1,\ldots,n-1\}} J(u_k) - J(u_*) \leq \epsilon\) by picking stepsize \(\lambda = \epsilon/L^2\) and doing \(n = (\|u_0-u_*\|_2L/\epsilon)^2\) iterations. However, for smooth convex functions we derive a stronger result that gradient-descent requires only \(\mathcal{O}(1/\epsilon)\) iterations (use exercise 6.4.2, the Lipschitz property, and the subgradient inequality). For smooth strongly convex functionals we can strengthen the result even further and show that we only need \(\mathcal{O}(\log 1/\epsilon)\) iterations (see exercise 6.4.1). The proofs are left as an exercise.
6.2.2. Proximal gradient methods¶
While the subgradient descent method is easily implemented, it does not fully exploit the structure of the objective. In particular, we can often split the objective in a smooth and a convex part. For the discussion we will assume for the moment that
where \(D\) is smooth and \(R\) is convex. We are then looking for a point \(u_*\) for which
Finding such a point can be done (again!) by a fixed-point iteration
where \(u = \left(I + \lambda \partial R\right)^{-1}(v)\) yields a point \(u\) for which \(\lambda^{-1}(v - u) \in \partial R(u)\). We can easily show that a fixed point of this iteration indeed solves the differential inclusion problem (6.6). Assuming a fixed point \(u_*\), we have
using the definition of \(\left(I + \lambda \partial R\right)^{-1}\) this yields
which indeed confirms that \(-D'(u_*) \in \partial R(u_*)\).
Definition: Proximal operator
The operator \(\left(I + \lambda \partial R\right)^{-1}\) is called the proximal operator of \(\lambda R\), whose action on input \(v\) is implicitly defined as solving
We usually denote this operator by \(\text{prox}_{\lambda R}(v)\).
With this, the proximal gradient method for solving (6.6) is then denoted as
Theorem: Convergence of the proximal point iteration
Let \(J = D + R\) be a functional with \(D\) smooth and \(R\) convex. Denote the Lipschitz constant of \(D'\) by \(L_D\). The iterates produced by (6.7) with a fixed stepsize \(\lambda = 1/L_D\) converge to a fixed point, \(u_*\), of (6.7).
If, in addition, \(D\) is convex the iterates converges sublinearly to a minimizer \(u_*\):
If \(D\) is \(\mu\)-strongly convex, the iteration converges linearly to a minimizer \(u_*\):
Proof
We refer to [Beck, 2017] Thms. 10.15, 10.21, and 10.29 or more details.
When compared to the subgradient method, we may expect better performance from the proximal gradient method when \(D\) is strongly convex and \(R\) is convex. Even if \(J\) is smooth, the proximal gradient method may be favorable as the convergence constants depend on the Lipschitz constant of \(D\) only; not \(J\). All this comes at the cost of solving a minimization problem at each iteration, so these methods are usually only applied when a closed-form expression for the proximal operator exists.
Example: one-norm
The proximal operator for the \(\ell_1\) norm solves
The solution obeys \(u - v \in -\partial \lambda \|u\|_1\), which yields
This condition is fulfulled by setting
Example: box constraints
The Proximal operator of the indicator function of \(\delta_{[a,b]^n}\) solves
The solution is given by
Thus, \(u\) is an orthogonal projection of \(v\) on \([a,b]^n\).
6.2.3. Splitting methods¶
The proximal point methods require that the proximal operator for \(R\) can be evaluated efficiently. In many practical applications this is not the cases, however. Instead, we may have a regularizer of the form \(R(Au)\) for some linear operator \(A\). Even when \(R(\cdot)\) admits an efficient proximal operator \(R(A\cdot)\) will, in general, not. In this section we discuss a class of methods that allow us to shift the operator \(A\) to the other part of the objective. As a model-problem we will consider solving
with \(D\) smooth and convex, \(R(\cdot)\) convex and \(A \in \mathbb{R}^{m\times n}\) a linear map. The basic idea is to introduce an auxiliary variable \(v\) and re-formulate the variational problem as
To solve such constrained optimization problems we employ the method of Lagrange multipliers which defines the Lagrangian
where \(\nu \in \mathbb{R}^m\) are called the Lagrange multipliers. The solution to (6.8) is a saddle point of \(\Lambda\) and we can thus be obtained by solving
The equivalence between (6.8) and (6.9) is established in the following theorem
Theorem: Saddle point theorem
Let \((u_*,v_*)\) be a solution to (6.8), then there exists a \(\nu^*\in\mathbb{R}^m\) such that \((u_*,v_*,\nu_*)\) is a saddle point of \(\Lambda\) and vice versa.
Proof
see these notes
Another important concept related to the Lagrangian is the dual problem.
Definition: Dual problem
The dual problem related to (6.9) is
For convex problems, the primal and dual problems are equivalent, giving us freedom when designing algorithms.
Theorem: Strong duality
The primal (6.9) and dual (6.10) are equivalent in the sense that
Proof
see these notes
Example: TV-denoising
The TV-denoising problem can be expressed as
with \(D \in \mathbb{R}^{m \times n}\) a discretisation of the first derivative. We can express the corresponding dual problem as
The first term is minimised by setting \(u = f^\delta - D^*\nu\). The second term is a bit trickier. First, we note that \(\lambda \|v\|_1 - \langle \nu, v\rangle\) is not bounded from below when \(\|\nu\|_{\infty} > \lambda\). Furthermore, for \(\|\nu\|_{\infty} \leq \lambda\) it attains a minimum for \(v = 0\).
This leads to
which is a constrained quadratic program. Since the first part is smooth and the proximal operator for the constraint \(\|\nu\|_{\infty} \leq \lambda\) is easy we can employ a proximal gradient method to solve the dual problem. Having solved it, we can retrieve the primary variable via the relation \(u = f^\delta - D^*\nu\).
The strategy illustrated in the previous approach is an example of a more general approach to solving problems of form (6.8).
Dual-based proximal gradient
We start from the dual problem (6.10):
In this expression we recognise the convex conjugates of \(D\) and \(R\). With this, we re-write the problem as
Thus, we have moved the linear map to the other side. We can now apply the proximal gradient method provided that:
We have a closed-form expression for the convex conjugates of \(D\) and \(R\);
\(R^*\) has a proximal operator that is easily evaluated.
For many simple functions, we do have such closed-form expressions of their convex conjugates. Moreover, to compute the proximal operator, we can use Moreau’s identity: \(\text{prox}_{R}(u) + \text{prox}_{R^*}(u) = u\).
It may not always be feasible to formulate the dual problem explicitly as in the previous example. In such cases we would rather solve (6.10) directly. A popular way of doing this is the Alternating Direction of Multipliers Method.
Alternating Direction of Multipliers Method (ADMM)
We augment the Lagrangian by adding a quadratic term:
We then find the solution by updating the variables in an alternating fashion
Efficient implementations of this method rely on the proximal operators of \(D\) and \(R\).
Example:TV-denoising
Consider the TV-denoising problem from the previous example.
The ADMM method find a solution via
We cannot do justice to the breadth and depth of the topics smooth and convex optimization in one chapter. Rather, we hope that this chapter serves as a starting point for further study in one of these areas for some, and provides useful recipes for others.
6.3. Exercises¶
6.3.1. Steepest descent for strongly convex functionals¶
Consider the following fixed point iteration for minimizing a given function \(J : \mathbb{R}^n \rightarrow \mathbb{R}\)
where \(J\) is twice continuously differentiable and strictly convex:
with \(0 < \mu < L < \infty\).
Show that the fixed point iteration converges linearly, i.e., \(\|u^{(k+1)} - u^*\| \leq \rho \|u^{(k)} - u*\|\) with \(\rho < 1\), for \(0 < \alpha < 2/L\).
Answer
Linear convergence implies that \(\exists 0 < \rho < 1\) such that
where \(u^*\). To show this we start from the iteration and substract the fixed-point and use that \(J'(u^*) = 0\) to get
Next use Taylor to express
with \(\eta^{(k)} = t u^{(k)} + (1-t)u^*\) for some \(t \in [0,1]\). We then get
For linear convergence we need \(\|I - \alpha J''(\eta^{(k)})\|_2 < 1\). We use that \(\|A\|_2 = \sigma_{\max}(A)\). (cf. Matrix norms) Since the eigenvalues of \(\J''\) are bounded by \(L\) we need \(0 < \alpha < 2/L\) to ensure this.
Determine the value of \(\alpha\) for which the iteration converges fastest.
Answer
The smaller the bound on the constant \(\rho\), the faster the convergence. We have
We obtain the smalles possible value by making both terms equal, for which we need
this gives us an optimal value of \(\alpha = 2/(\mu + L)\).
6.3.2. Steepest descent for convex functions¶
Let \(J : \mathbb{R}^n\) be convex and Lipschitz-smooth. Show that the basic steepest-descent iteration with step size \(\lambda = 1/L\) produces iterates for which
The key is to use that
Answer
Start from the inequality and set \(v = u_{k+1} = u_k - \lambda J'(u_k)\) and \(u = u_k\), yielding
Using convexity of \(J\) we find
Using a telescoping sum and the fact that \(J(u_{k+1}) \leq J(u_k)\) yields the desired result.
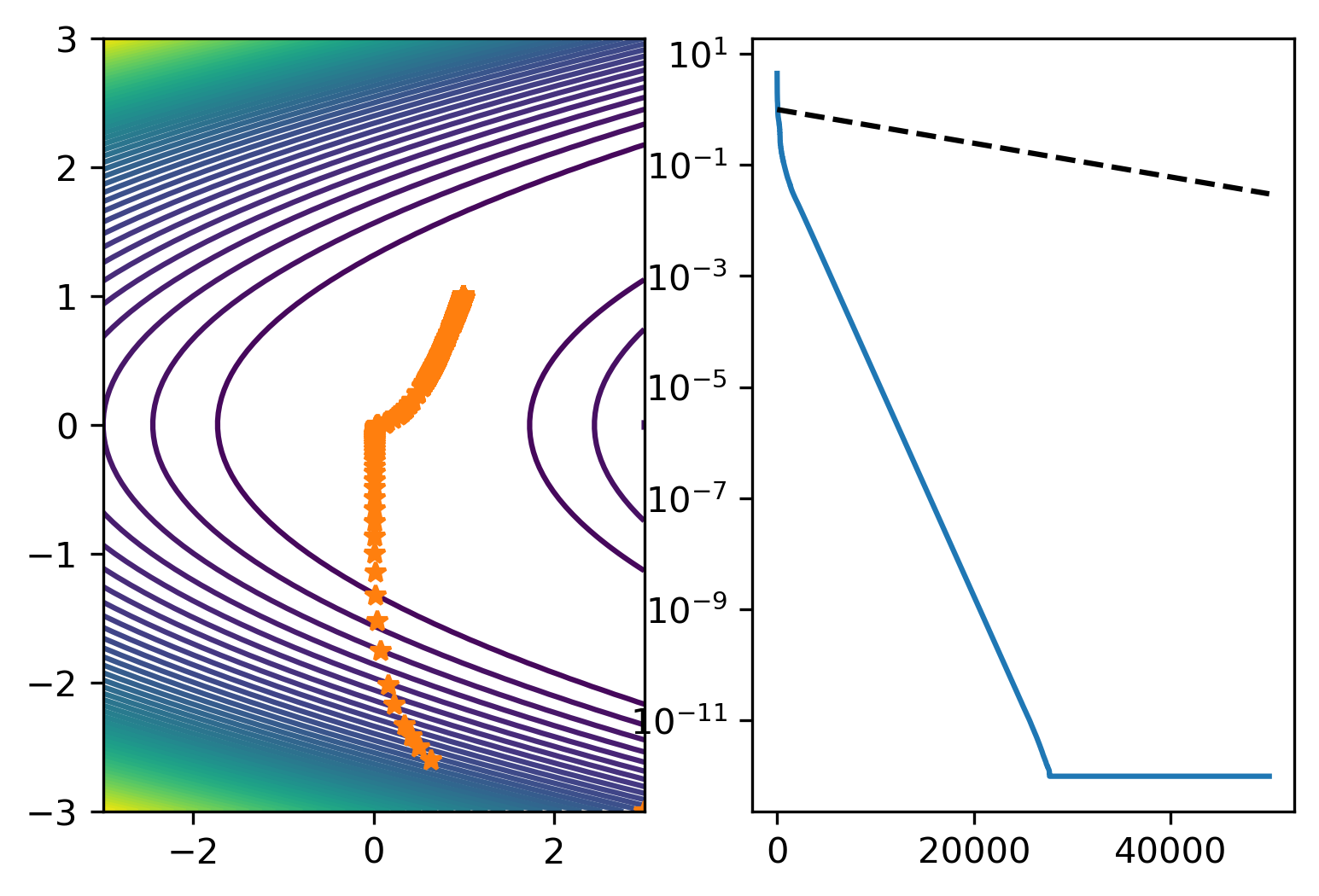
6.3.3. Rosenbrock¶
We are going to test various optimization methods on the Rosenbrock function
with \(a = 1\) and \(b = 100\). The function has a global minimum at \((a, a^2)\).
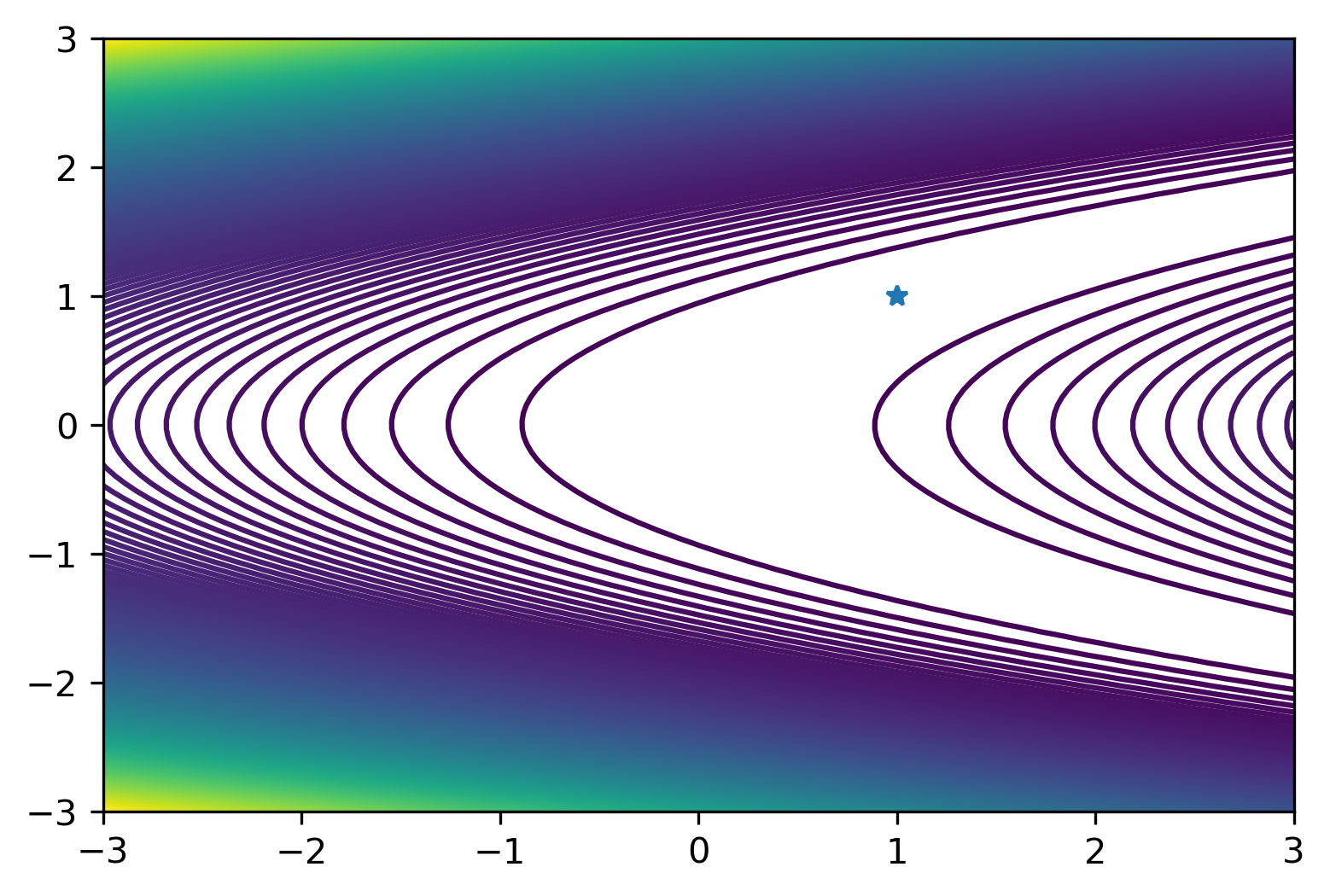
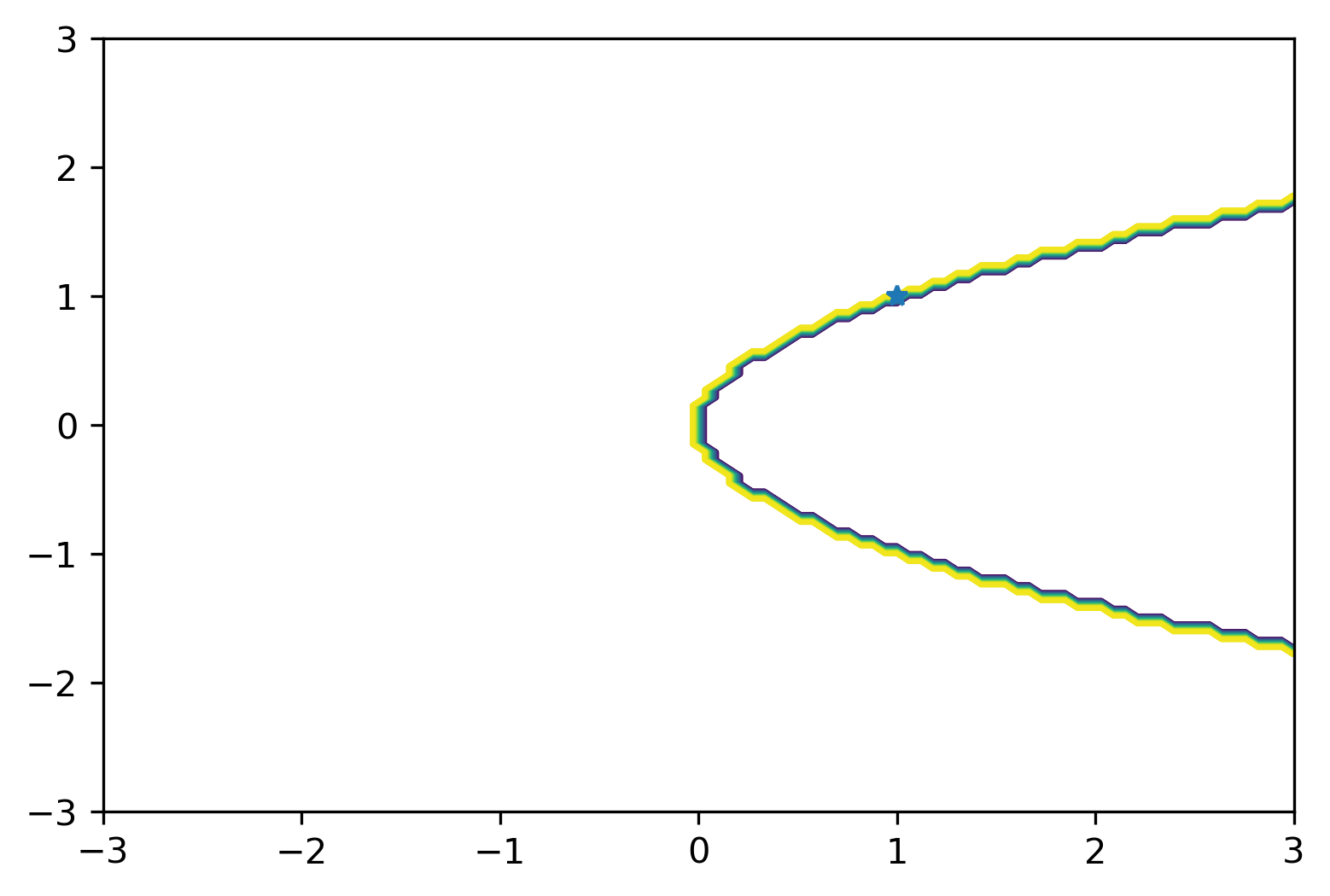
Write a function to compute the Rosenbrock function, its gradient and the Hessian for given input \((x,y)\). Visualize the function on \([-3,3]^2\) and indicate the neighborhood around the minimum where \(f\) is convex.
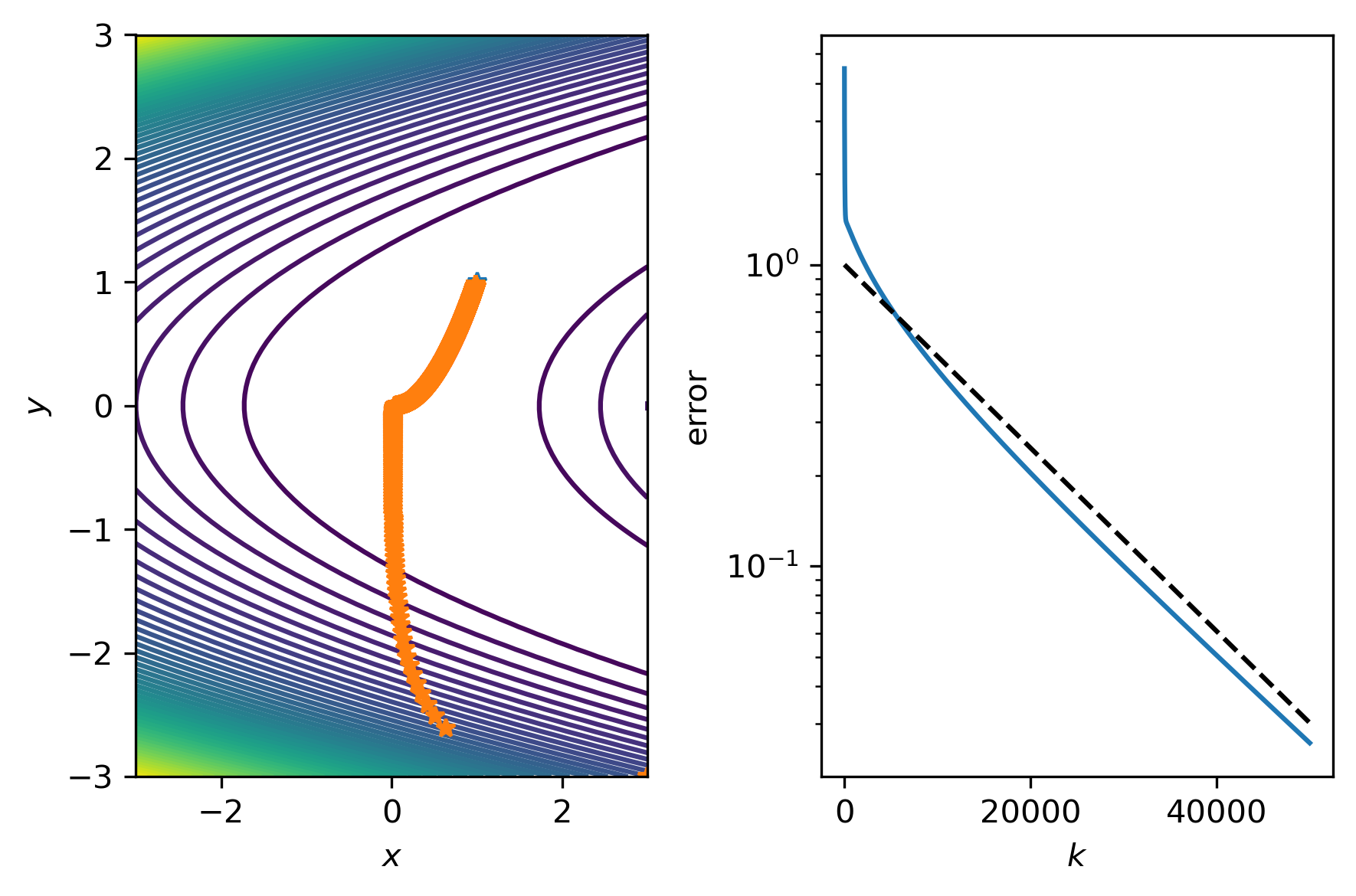
Implement the method from exercise 1 and test convergence from various initial points. Does the method always convergce? How small do you need to pick \(\alpha\)? How fast?
Implement a linesearch strategy to ensure that \(\alpha_k\) satisfies the Wolfe conditions, does \(\alpha\) vary a lot?
Answer
In de code below, we show a graph of the function and determine the region of convexity by computing the eigenvalues of the Hessian (should be positive)
We observe linear convergence for small enough \(\alpha\)
Using a linesearch we obtain faster convergence by allowing larger steps in the beginning.
# import libraries
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['figure.dpi'] = 300
from scipy.optimize import line_search
# rosenbrock function
def rosenbrock(x,a=1,b=100):
x1 = x[0]
x2 = x[1]
f = (a - x1)**2 + b*(x2 - x1**2)**2
g = np.array([-2*(a - x1) - 4*x1*b*(x2 - x1**2), 2*b*(x2 - x1**2)])
H = np.array([[12*b*x1**2 -4*b*x2 + 2, -4*x1*b],[-4*b*x1, 2*b]])
return f,g,H
# steepest descent
def steep(f,x0,alpha,niter):
n = len(x0)
x = np.zeros((niter,n))
x[0] = x0
for k in range(niter-1):
fk,gk,_ = f(x[k])
x[k+1] = x[k] - alpha*gk
return x
# steepest descent with linesearch
def steep_wolfe(f,x0,alpha0,niter):
n = len(x0)
x = np.zeros((niter,n))
x[0] = x0
for k in range(niter-1):
fk,gk,_ = f(x[k])
pk = -alpha0*gk #reference stepsize
alpha = line_search(lambda x : rosenbrock(x)[0], lambda x : rosenbrock(x)[1], x[k], pk)[0]
if alpha: # check if linesearch was successfull
x[k+1] = x[k] + alpha*pk
else: # if not, use regular step
x[k+1] = x[k] + pk
return x
# plot of the Rosenbrock function
n = 100
x1 = np.linspace(-3,3,n)
x2 = np.linspace(-3,3,n)
xx1,xx2 = np.meshgrid(x1,x2)
xs = np.array([1,1])
fs = np.zeros((n,n))
for i in range(n):
for j in range(n):
fs[i,j],_,_ = rosenbrock((x1[i],x2[j]))
plt.contour(xx1,xx2,fs,levels=200)
plt.plot(xs[0],xs[1],'*')
[<matplotlib.lines.Line2D at 0x7f9f655d17c0>]
# determine region of convexity by computing eigenvalues of the Hessian
e1 = np.zeros((n,n))
e2 = np.zeros((n,n))
for i in range(n):
for j in range(n):
_,_,Hs = rosenbrock((x1[i],x2[j]))
e1[i,j],e2[i,j] = np.linalg.eigvals(Hs)
plt.contour(xx1,xx2,(e1>0)*(e2>0),levels=50)
plt.plot(xs[0],xs[1],'*')
[<matplotlib.lines.Line2D at 0x7f9f624aec10>]
# run steepest descent
L = 12122
alpha = 1.99/L
maxiter = 50000
x = steep(rosenbrock, [3,-3],alpha,maxiter)
# plot
k = np.linspace(1,maxiter,maxiter)
fig,ax = plt.subplots(1,2)
ax[0].contour(xx1,xx2,fs,levels=50)
ax[0].plot(1,1,'*')
ax[0].plot(x[:,0],x[:,1],'*')
ax[0].set_xlabel(r'$x$')
ax[0].set_ylabel(r'$y$')
ax[1].semilogy(k,np.linalg.norm(x - xs,axis=1),k,(.99993)**k,'k--')
ax[1].set_xlabel(r'$k$')
ax[1].set_ylabel('error')
fig.tight_layout()
plt.show()
# run steepest descent with linesearch
L = 12122
alpha = 1.99/L
maxiter = 50000
x = steep_wolfe(rosenbrock, [3,-3],1.99/L,50000)
# plot
k = np.linspace(1,maxiter,maxiter)
fig,ax = plt.subplots(1,2)
ax[0].contour(xx1,xx2,fs,levels=50)
ax[0].plot(1,1,'*')
ax[0].plot(x[:,0],x[:,1],'*')
ax[1].semilogy(k,np.linalg.norm(x - xs,axis=1),k,(.99993)**k,'k--')
/opt/anaconda3/envs/jbook/lib/python3.8/site-packages/scipy/optimize/linesearch.py:478: LineSearchWarning: The line search algorithm did not converge
warn('The line search algorithm did not converge', LineSearchWarning)
/opt/anaconda3/envs/jbook/lib/python3.8/site-packages/scipy/optimize/linesearch.py:327: LineSearchWarning: The line search algorithm did not converge
warn('The line search algorithm did not converge', LineSearchWarning)
[<matplotlib.lines.Line2D at 0x7f9f65908460>,
<matplotlib.lines.Line2D at 0x7f9f65908610>]
6.3.4. Subdifferentials¶
Compute the subdifferentials of the following functionals \(J : \mathbb{R}^n \rightarrow \mathbb{R}_+\):
The Euclidean norm \(J(u) = \|u\|_2\).
The elastic net \(J(u) = \alpha \|u\|_1 + \beta \|u\|_2^2\)
The weighted \(\ell_1\)-norm \(J(u) = \|Du\|_1\), with \(D \in \mathbb{R}^{m\times n}\) for \(m < n\) a full-rank matrix.
Answer
When \(\|u\|_2 \not=0\) we have \(\partial J(u) = \{u/\|u\|_2\}\). Otherwise we have \(\partial J(0) = \{g \in \mathbb{R}^n | \|g\|_2 \leq 1\}\). Indeed, we can check that for all \(g \in \partial J(0)\) we have \(\langle g,v\rangle \leq \|v\|_2\) for all \(v \in \mathbb{R}^n\).
An element \(g\) of \(\partial \|u\|_1\) has entries
For \(\|u\|_2^2\) we have \(\partial \|u\|_2^2 = {u}\). Combining gives
We get \(\partial \|Du\|_1 = \{D^Tg\}\), with \(g\) given by
where \(v = Du\).
6.3.5. Dual problems¶
Derive the dual problems for the following optimization problems
\(\min_u \|u - f^\delta\|_1 + \lambda \|u\|_2^2\).
\(\min_u \textstyle{\frac{1}{2}}\|u - f^\delta\|_2^2 + \lambda \|u\|_p, \quad p \in \mathbb{N}_{>0}\).
\(\min_{u \in [-1,1]^n} \textstyle{\frac{1}{2}}\|u - f^\delta\|_2^2\).
Answer
We end up with having to solve \(\min_u \|u-f\|_1 + \langle \nu,u\rangle\) and \(\min_v \lambda \|v\|_2^2 - \langle \nu, v \rangle\). For the first, we note that the optimal value tends to \(- \infty\) when \(\|\nu\|_{\infty} > 1\). For \(\|\nu\|_{\infty} \leq 1\) the minimum is attained at \(u = f\), giving \(\langle \nu,f\rangle\). The second one is easy, since we can compute the optimality condition easily: \(2\lambda v - \nu = 0\) giving \(v = (2\lambda)^{-1}\nu\) which leads to \(-(4\lambda)^{-1}\|\nu\|_2^2\). We end up with
In terms of the optimal solution this is equivalent to
From \(\min_{u} \textstyle{\frac{1}{2}}\|u - f^\delta\|_2^2 + \langle \nu,u\rangle\) we get \(-\textstyle{\frac{1}{2}}\|\nu\|_2^2 + \langle \nu,f^\delta\rangle\). From \(\min_{v} \lambda \|v\|_p - \langle \nu,v\rangle\) we get the constraint \(\|\nu\|_{q}\leq \lambda\) with \(p^{-1} + q^{-1} = 1\) (follows from Hölder’s inequality). Using \(\min_{v} \lambda \|v\|_p - \langle \nu,v\rangle\) when \(\|\nu\|_{q}\leq \lambda\), we obtain
which in terms of the optimal solution is equivalent to
Given a function \(\delta_A\) such that \(\delta_A(x)=0\) if \(x\in A\) and \(\delta_A(x)=\infty\) if \(x \notin A\), the saddle-point problem is
The first part is the same as the previous one. The second attains its minimum at \(v_i = \text{sign}(\nu_i)\) which yields \(-\|\nu\|_1\). Thus the dual problem is
which in terms of the optimal solution is equivalent to
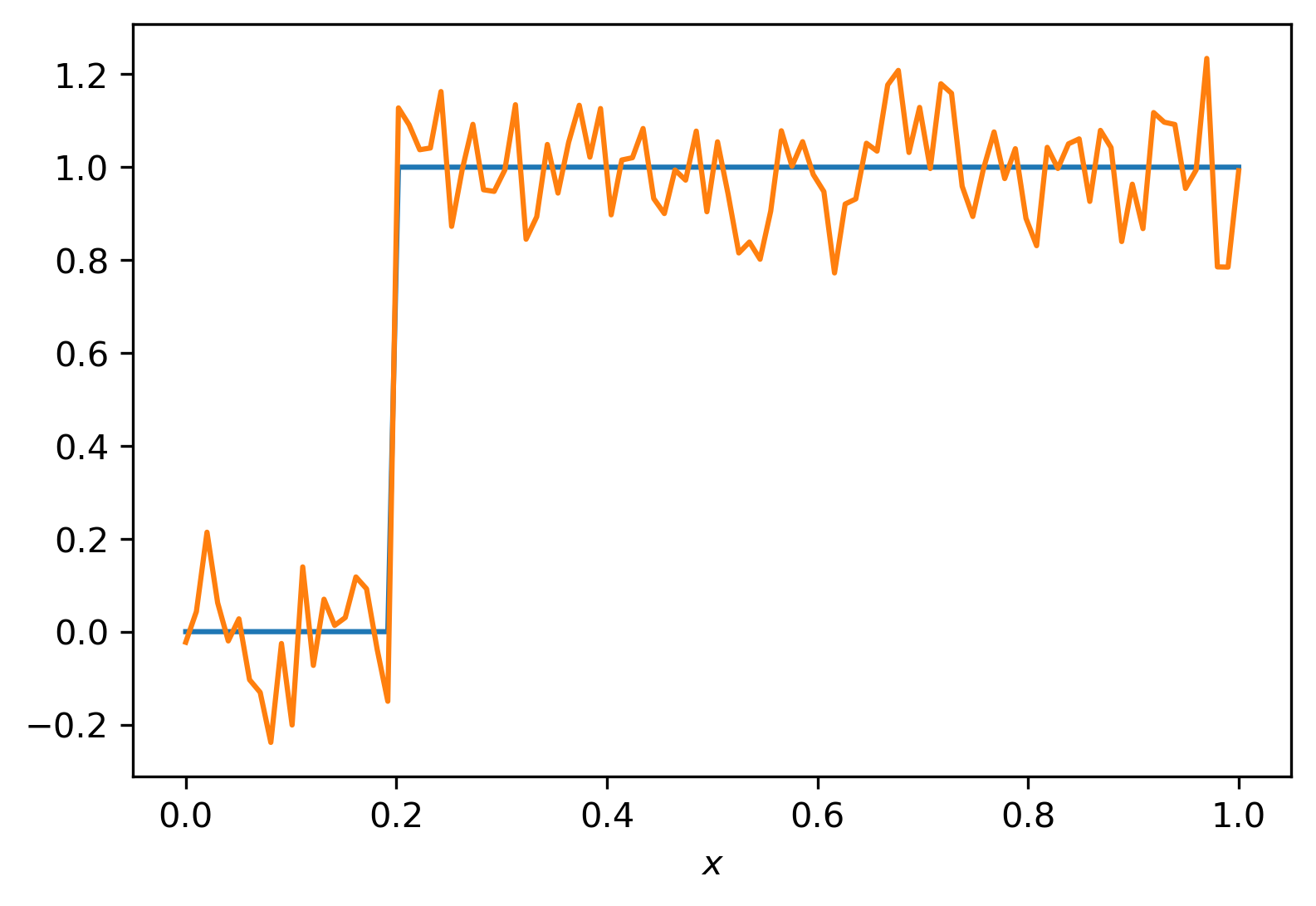
6.3.6. TV-denoising¶
In this exercise we consider a one-dimensional TV-denoising problem
with \(D\) a first-order finite difference discretization of the first derivative.
Show that the problem is equivalent (in terms of solutions) to solving
Implement a proximal-gradient method for solving the dual problem.
Implement an ADMM method for solving the (primal) denoising problem.
Test and compare both methods on a noisy signal. Example code is given below.
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['figure.dpi'] = 300
# grid \Omega = [0,1]
n = 100
h = 1/(n-1)
x = np.linspace(0,1,n)
# parameters
sigma = 1e-1
# make data
u = np.heaviside(x - 0.2,0)
f_delta = u + sigma*np.random.randn(n)
# FD differentiation matrix
D = (np.diag(np.ones(n-1),1) - np.diag(np.ones(n),0))/h
# plot
plt.plot(x,u,x,f_delta)
plt.xlabel(r'$x$')
plt.show()
Answer
The saddle-point problem is
See the example and previous exercise for details.
The basic iteration for proximal-gradient is
with
The basic iteration for ADMM is
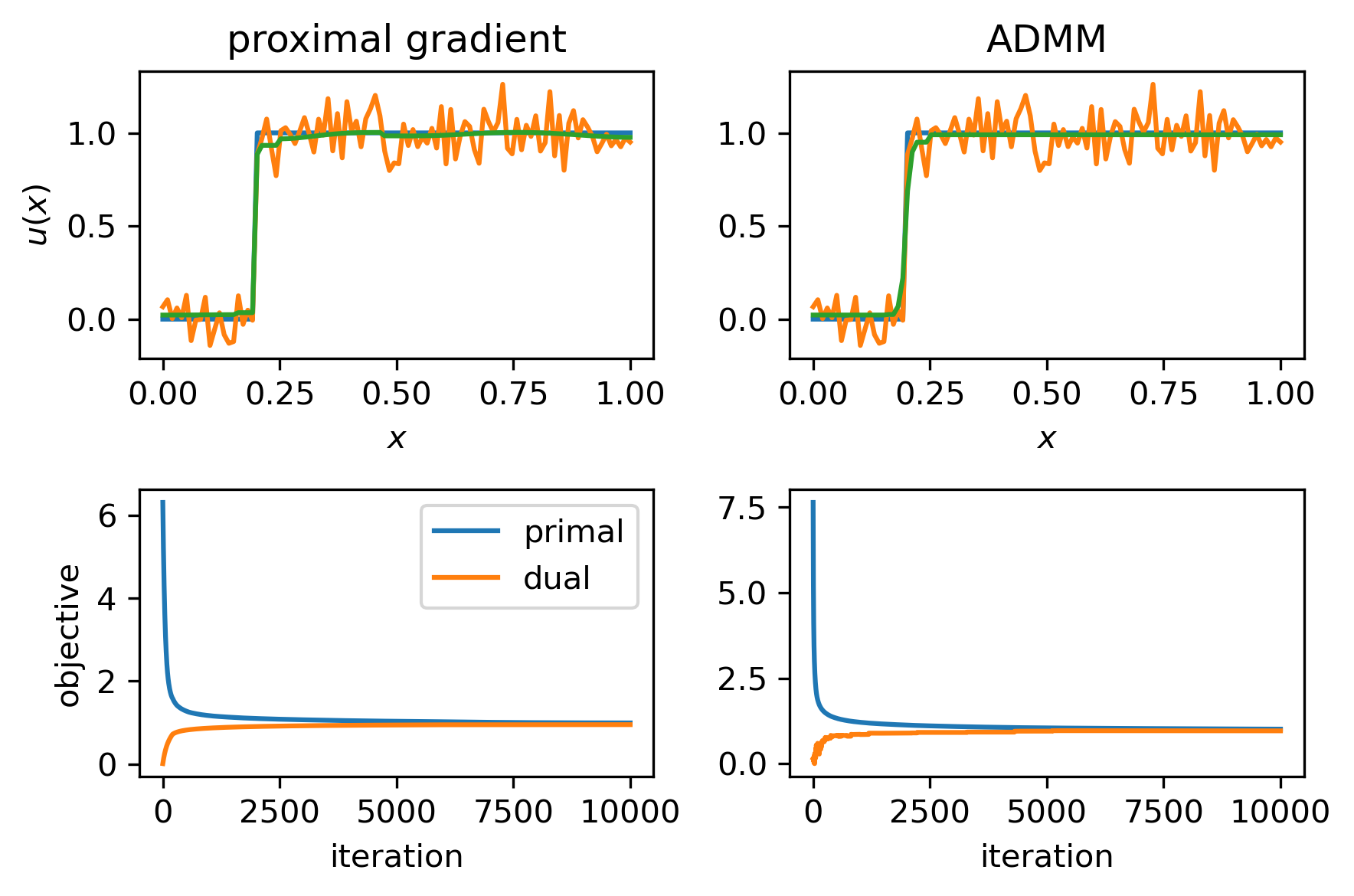
Below we see results for both methods using \(\lambda = 5\cdot 10^{-3}\), \(\alpha = 1/\|D\|^2\), \(\rho = 1\). Both methods give comparable results and exhibit very similar convergence behaviour.
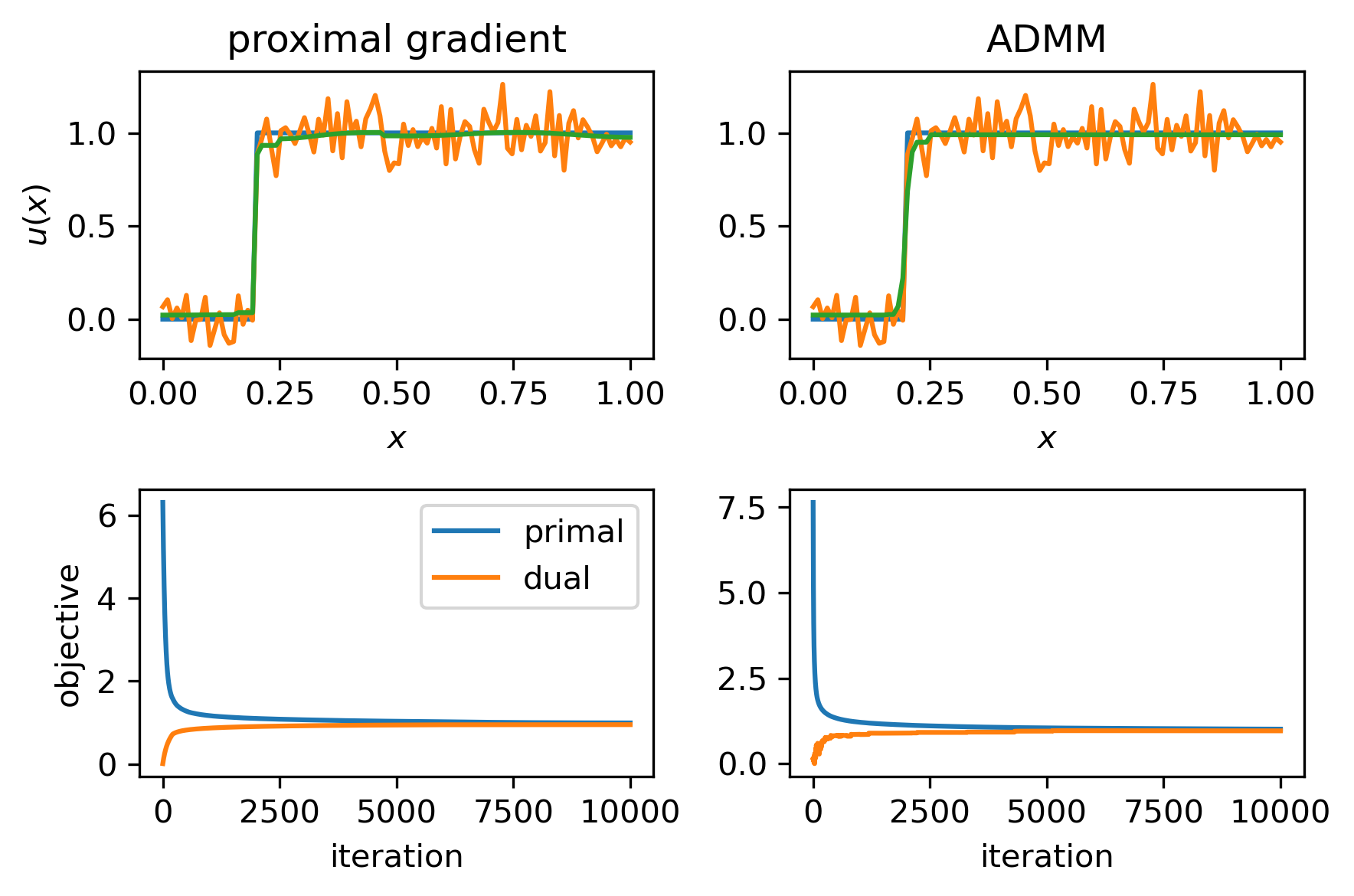
Fig. 6.3 Results for TV denoising using the proximal gradient method and ADMM.¶
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['figure.dpi'] = 300
from myst_nb import glue
def prox_grad(f,lmbda,D,alpha,niter):
nu = np.zeros(D.shape[0])
hist = np.zeros((niter,2))
P = lambda nu : np.piecewise(nu, [np.abs(nu) <= lmbda, np.abs(nu) > lmbda], [lambda x : x, lambda x : lmbda*np.sign(x)])
for k in range(0,niter):
nu = P(nu - alpha*D@(D.T@nu - f))
u = f - D.T@nu
primal = 0.5*np.linalg.norm(u - f)**2 + lmbda*np.linalg.norm(D@u,ord=1)
dual = -0.5*np.linalg.norm(D.T@nu) + f.dot(D.T@nu)
hist[k] = primal, dual
return u, hist
def admm(f,lmbda,D,rho,niter):
m,n = D.shape
nu = np.zeros(m)
v = np.zeros(m)
u = np.zeros(n)
hist = np.zeros((niter,2))
T = lambda v : np.piecewise(v, [v < -lmbda/rho, np.abs(v) <= lmbda/rho, v > lmbda/rho], [lambda x : x + lmbda/rho, lambda x : 0, lambda x : x - lmbda/rho])
for k in range(0,niter):
u = np.linalg.solve(np.eye(n) + rho*D.T@D, f + D.T@(rho*v - nu))
v = T(D@u + nu/rho)
nu = nu + rho*(D@u - v)
primal = 0.5*np.linalg.norm(u - f)**2 + lmbda*np.linalg.norm(D@u,ord=1)
dual = -0.5*np.linalg.norm(D.T@nu) + f.dot(D.T@nu)
hist[k] = primal, dual
return u, hist
# grid \Omega = [0,1]
n = 100
h = 1/(n-1)
x = np.linspace(0,1,n)
# parameters
sigma = 1e-1
niter = 10000
lmbda = 5e-3
# make data
u = np.heaviside(x - 0.2,0)
f_delta = u + sigma*np.random.randn(n)
# FD differentiation matrix
D = (np.diag(np.ones(n-1),1)[:-1,:] - np.diag(np.ones(n),0)[:-1,:])/h
# proximal gradient on dual problem
alpha = 1/np.linalg.norm(D)**2
u_prox, hist_prox = prox_grad(f_delta,lmbda,D,alpha,niter)
# ADMM
rho = 1
u_admm, hist_admm = admm(f_delta,lmbda,D,rho,niter)
# plot
fig,ax = plt.subplots(2,2)
ax[0,0].set_title('proximal gradient')
ax[0,0].plot(x,u,x,f_delta,x,u_prox)
ax[0,0].set_xlabel(r'$x$')
ax[0,0].set_ylabel(r'$u(x)$')
ax[1,0].plot(hist_prox[:,0],label='primal')
ax[1,0].plot(hist_prox[:,1],label='dual')
ax[1,0].legend()
ax[1,0].set_xlabel('iteration')
ax[1,0].set_ylabel('objective')
ax[0,1].set_title('ADMM')
ax[0,1].plot(x,u,x,f_delta,x,u_admm)
ax[0,1].set_xlabel(r'$x$')
ax[1,1].plot(hist_admm[:,0],label='primal')
ax[1,1].plot(hist_admm[:,1],label='dual')
ax[1,1].set_xlabel('iteration')
fig.tight_layout()
glue("TV_exercise",fig)
6.4. Assignments¶
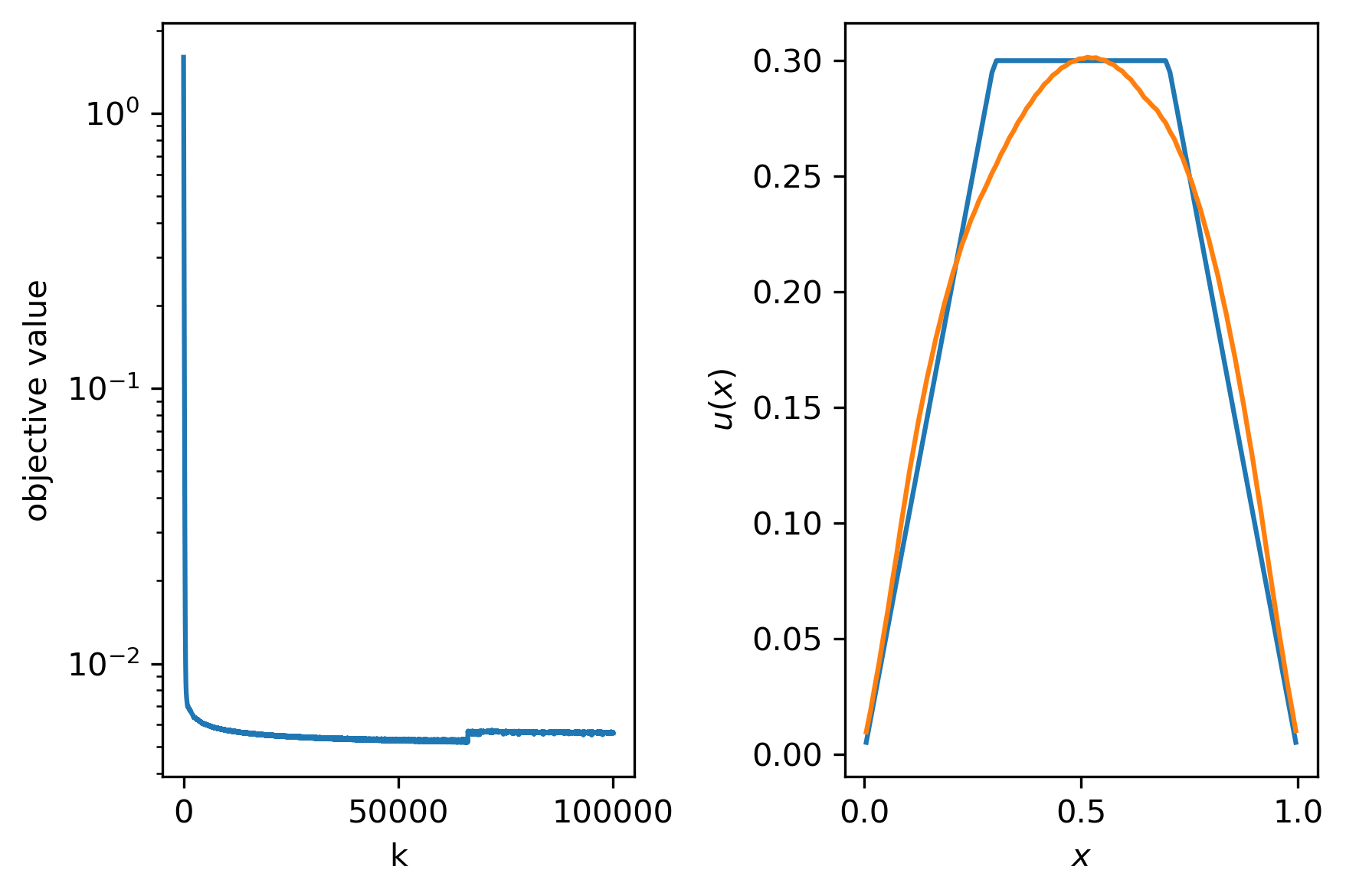
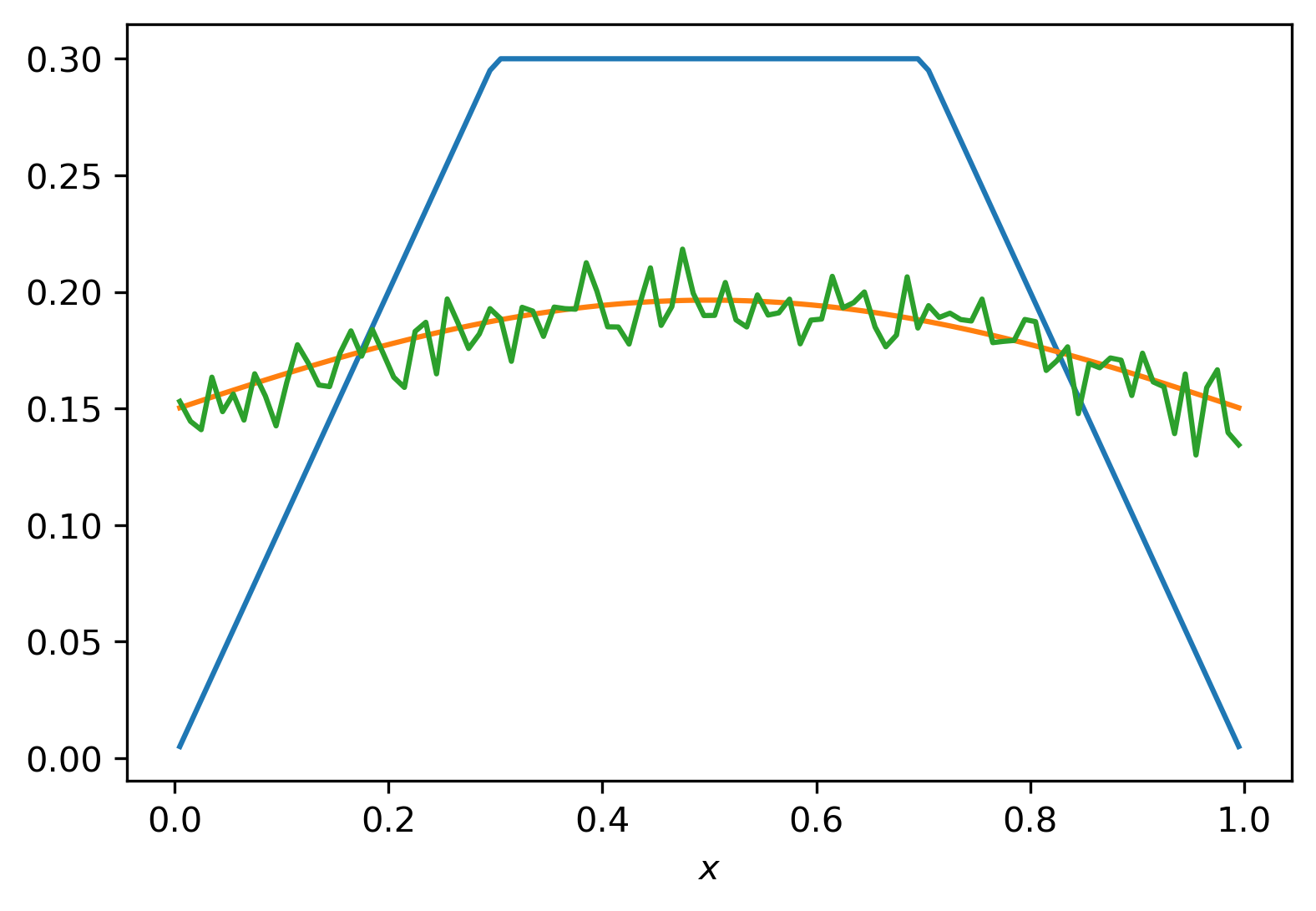
6.4.1. Spline regularisation¶
The aim is to solve the following variational problem
where \(K\) is a given forward operator (matrix) and \(L\) is a discretization of the second derivative operator.
Design and implement a method for solving this variational problem; you can be creative here – multiple answers are possible
Compare your method with the basic subgradient-descent method implemented below
(bonus) Find a suitable value for \(\alpha\) using the discrepancy principle
Some code to get you started is shown below.
# import libraries
import numpy as np
import matplotlib.pyplot as plt
import matplotlib as mpl
mpl.rcParams['figure.dpi'] = 300
# forward operator
def getK(n):
h = 1/n;
x = np.linspace(h/2,1-h/2,n)
xx,yy = np.meshgrid(x,x)
K = h/(1 + (xx - yy)**2)**(3/2)
return K,x
# define regularization operator
def getL(n):
h = 1/n;
L = (np.diag(np.ones(n-1),-1) - 2*np.diag(np.ones(n),0) + np.diag(np.ones(n-1),1))/h**2
return L
# define grid and operators
n = 100
delta = 1e-2
K,x = getK(n)
L = getL(n)
# true solution and corresponding data
u = np.minimum(0.5 - np.abs(0.5-x),0.3 + 0*x)
f = K@u
# noisy data
noise = np.random.randn(n)
f_delta = f + delta*noise
# plot
plt.plot(x,u,x,f,x,f_delta)
plt.xlabel(r'$x$')
plt.show()
# example implementation of subgradient-descent
def subgradient(K, f_delta, alpha, L, t, niter):
n = K.shape[1]
u = np.zeros(n)
objective = np.zeros(niter)
for k in range(niter):
# keep track of function value
objective[k] = 0.5*np.linalg.norm(K@u - f_delta,2)**2 + alpha*np.linalg.norm(L@u,1)
# compute (sub) gradient
gr = (K.T@(K@u - f_delta) + alpha*L.T@np.sign(L@u))
# update with stepsize t
u = u - t*gr
return u, objective
# get data
n = 100
delta = 1e-2
K,x = getK(n)
L = getL(n)
u = np.minimum(0.5 - np.abs(0.5-x),0.3 + 0*x)
f_delta = K@u + delta*noise
# parameters
alpha = 1e-6
niter = 100000
t = 1e-2
# run subgradient descent
uhat, objective = subgradient(K, f_delta, alpha, L, t, niter)
# plot
fig,ax = plt.subplots(1,2)
ax[0].semilogy(objective)
ax[0].set_xlabel('k')
ax[0].set_ylabel('objective value')
ax[1].plot(x,u,label='ground truth')
ax[1].plot(x,uhat,label='reconstruction')
ax[1].set_xlabel(r'$x$')
ax[1].set_ylabel(r'$u(x)$')
fig.tight_layout()